MICRO-502_Aerial_Robotics_NotesIntro (week1)OverviewFixed wing Staying in the AirMaintaining constant speed VMajor Application FieldsFor AgricultureFor EnergyFor Public safety & securityFor DeliveryCategory«Can Drones Deliver?»Last-cm delivery - Dronistics☑️ CheckpointsMulticopters (week1)IntroductionRotorcrafts (helicopters vs multicopters)Pros and ConsPros-Easy to build and maintainConsStructure and PhysicsMain componentsConfigurationRotation speeds / Forces / MomentsHover conditionsFlight mechanicsMoving Up and DownRotating in YawRotation in Roll/PitchSummary of equationsExample-Translated flightTypes of MulticoptersConfigurationFully Actuated MulticoptersFeaturesProsConsEnergeticsEnergy in hoveringEnergy in forward flight of quadcopterIncrease flight time☑️ CheckpointsAttitude representations (week2)3D Attitude representation- Euler AnglesQuaternionConversionComplex examples✖️ CheckpointsControl (week2&3)Cascaded control ArchitectureControl allocationMethodRemarkRate controlAttitude controlFull quaternion based attitude control for a quadrotorControl strategies for multicoptersLinearExamplesFeaturesPID controllerLQR/LQGNonlinearExamplesFeaturesAn introduction to fully actuated multirotor UAVs☑️ CheckpointsState Estimation (week3&4)Introduction to State EstimationWhy State Estimation in Robotics?Estimation for deterministic systemsState Observer (or Luenberger Observer)Dynamical SystemsEstimation errorState Estimation for stochastic systemsRecap of fundamental conceptsKalman filter (KF)PREDICTIONUPDATEsensor fusion on a quadrotorIntro to EKF, UKF and particle filtersEKFOverviewEquationsUKFParticle filtersState Estimation in aerial roboticsin lab settingsOutdoor☑️ Checkpoints🚧 Navigation (week5)Velocity controlWaypoint NavigationDubins PathsVector fields☑️ Checkpoints🚧 VIO & SLAM (week5)VIOSLAM☑️ CheckpointsFixed-wing drones (week6)IntroductionStructureFlight MechanicsControl surfaceStabilityEnergeticsInduced powerProfile and parasite power☑️ CheckpointsAerial Swarms (week7)IntroReynolds flocking algorithm (Reynolds, 1987)Reynolds flocking: modelReynolds flocking with migrationCase: Aerial swarms for disaster mitigationCommunication radius and turning angleVirtual agents for flocking with fixed-wing dronesReynolds flocking with obstacles (Virtual agents)Other modelsVicsek model: particles in confined environments (密闭环境)Olfati-Saber modelDrone SwarmsVisual information in flockingSoria2019IRC-influence of limited visual sensing using ReynoldsSchilling2019RAL-Learning to flock in simulation with visionSchilling2021RAL-Learning to flock outdoor with vision☑️ Check pointsFlapping-Wing (week8)IntroductionStructureFlight mechanics - Lift generationLift generation in hovering flightAsymmetric hoveringSymmetric hoveringLift generation in forward flightFlight mechanics - ManeuveringEnergetics☑️ CheckpointsDrone Regulations (week8)3 Pillar Concept / Drone CategoriesActSpecific CategoryU-Space☑️ CheckpointsUAS Hardware (week9)IntroductionFrame and materialsmaterials comparisonmetric when considering materialsEnergy sourcesCategoryEnergy and power densityLi-Po batteriesDischarge Curves of Li-Po batteryEnergy Curve of Li-Po batteryActuatorsActuators for propulsionElectric motor example-Brushless DC electric motorsActuators for control/maneuveringServomotorsExamples of ServomotorsPropellersCharacteristicsPitch and efficiency at different cruise speedChoose the right combination actuator and propellerSensorsGyroscopesAccelerometersMagnetometersPressure / Altitude sensorsAirspeed sensorsGlobal positioning system (GPS)Power sensorsOptic flow camerasAutopilotsCommunication protocols✖️ CheckpointsInsect-inspired vision (week10)Optical flowFor pure translational motionSensors used for flight controlArchitecture of insect eyes and brainsElementary Motion Detector 初级运动检测器Experiment - Optomotor Response 视运动反应Wide-field, motion-specific neuronsOptic Flow ComputationGradient Descent MethodsImage Interpolation Algorithm –I2AObstacle avoidance with I2A☑️ CheckpointsAdaptive Morphology in Flying Animals and Drones (week10)Bioinspired Mechanical ResilienceHow do insects cope with collisions?The Size ProblemSelf-deployable origami droneOrigami Drone WingAdaptive Morphology☑️ CheckpointsAgile Flight (week11)Autonomous drone racingDrone acrobaticsLow-latency sensingLearning of flight controllers (week11)challenge1: Architecture/Input and Output representationchallenge2: Data collectionLimitations of Imitation Learning -> RLRL limitationschallenge3: Guarantee the platform's safety during training and testingTakeaways
MICRO-502_Aerial_Robotics_Notes
Lecture notes by Yujie He
Last updated on 2021/07/02
All checkpoints summary can be found here!
Intro (week1)
Overview
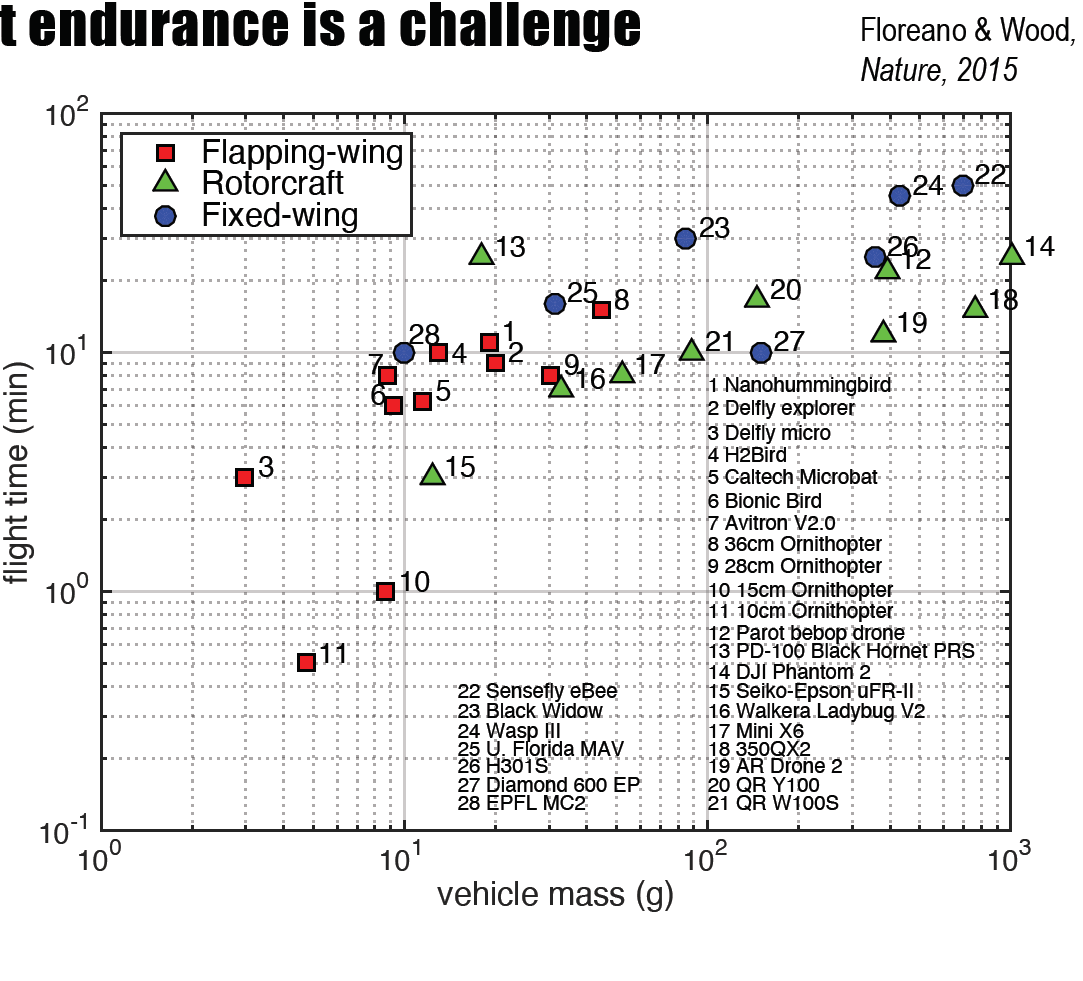
Most Civilian Drones are Small
- flapping wings: operates in small scale; short flight time
- rotorcraft/multicopters: in medium; could hover in place
- fixed wings: fixed has longest flight time; cannot hover in place
but endurance is a challenge
Fixed wing Staying in the Air
generate a force Lift L equal and opposite to its own weight W
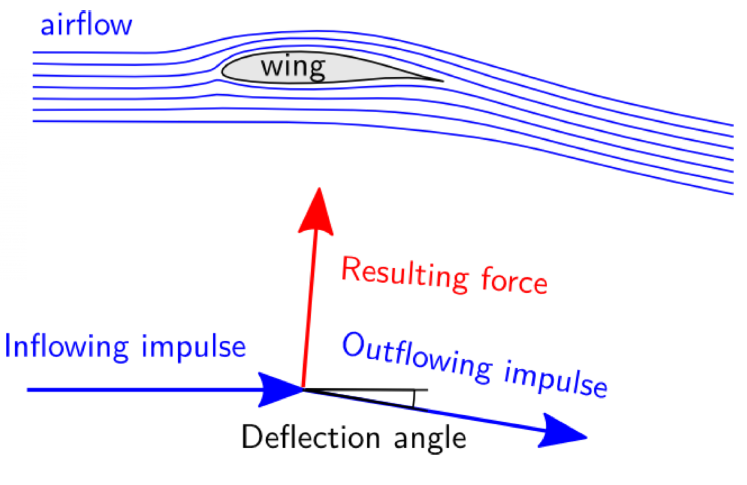
fixed-wing generates by airflow
computing lift: (sea level)
lift coefficient : proportional to angle of attack
at cruise speed , assuming
Air density: decreases with the altitude
1.25 at sea level
Air speed V: fly 2x as fast -> 4x lift
Wing area S
compute the required velocity
Speed is proportional only to wing loading W/S
Maintaining constant speed V
generate a thrust force T equal and opposite to Drag force D
Drag
lift-drag ratio
Major Application Fields
- Agriculture
- Energy
- Public safety & security
- Delivery
For Agriculture
fixed-wing
inspection: large fields; few lights/value
quadcopter
spraying: small fields; high-value crops; difficult terrain
For Energy
stationary inspection
fire, related to human safety
long-range inspection
frequent, faster inspection to powerline, gasoline
Power generation
strong & steady winds
For Public safety & security
in-vehicle
policeman
long-range
Border patrol, fast intervention
For Delivery
Category
- Long-range: fixed wing; combination of wing and rotors to cover long distance
- Short-range: multicopter
Forcast: parcel delivery > air freight in near future
«Can Drones Deliver?»
Power requirement: 0.59kW
deliver 2 kg payload at cruising speed of 45 km/h
Energy requirement: about 0.39kWh
deliver 2 kg payload within 10 km radius with 30 km/h headwind
- power (kW) x distance to speed ratio (d/v) to get energy requirement (kWh)
Battery & Platform: choose considerations -> cost; weight; energy density; lifetime
Economics: Electricity/Battery cost per km
Last-cm delivery - Dronistics
Packdrone + SimplyFly
Protective foldable cage; Redundant GPS
Temperature-control box
☑️ Checkpoints
For a given total mass, what type of small drones (multi-copter, fixed-wing, flapping wing) displays the longest endurance?
fixed-wing
fixed-wing drones generate lift with their wings. This means that, unlike a multirotor drone, they don't expend large amounts of energy just to stay in the air and fly more efficiently as a result
How much faster must an intercontinental airplane fly at cruising altitude compared to sea level?
- sea level:
- intercontinental airplane fly ~10000m:
What structural factor (i.e. not the engine) affects the cruising speed of fixed-wing drones?
Speed is only proportional to wing loading (W/S) = Weight/Wing area- wing angle -> lift coefficient
- wing area
What are the two major drone applications in agriculture?
Inspection and spraying
What are the drone applications in the energy sector?
Stationary inspection; long-range inspection; and power generation
What are the factors to consider for calculating the cost/km of drone delivery?
Electricity cost and battery cost
Multicopters (week1)
| Fixed wing | Flapping wing | rotating wing | |
|---|---|---|---|
| Examples | airplanes, gliders | new robots | helicopters, multicopters |
| Pros | Fast; Efficient | Efficient | Can hover;Highly maneuverable |
| Cons | Cannot Hover | Hard to build and control | Less efficient |
| Features | Scale down in size | Vertical take-off and landing (VTOL) |
Introduction
Rotorcrafts (helicopters vs multicopters)
generates lift using high speed rotary blades called rotors
Features
- Vertical take-off and landing (VTOL)
- Very maneuverable
- Less efficient than fixed wing vehicle
helicopters-Need complex variable pitch rotors
- the tail produce a moment to counteract the force generated by main propeller blade when generating main lift
- change the pitch of the blades (force vector) to produce translation-add complexity
multicopters-Use multiple fixed-pitch blades
- each spin in different directions; don't need tails due to balanced moment
- fix pitch propellers
overtaken by helicopters due to heavy workload of the pilot
Pros and Cons
Pros-Easy to build and maintain
- Mechanically simple
- Does not require any complex mechanical parts
- Can move around by changing motor speed
- Can hover, takeoff, and land vertically
Cons
- Required energy constantly to hover
- less efficient than helicopters of the same size because the thrust is generated by smaller propellers.
Structure and Physics
Main components
frame; control board; Motors and motor drivers (ESC, electronic speed controller); Propellers; Battery; Receiver
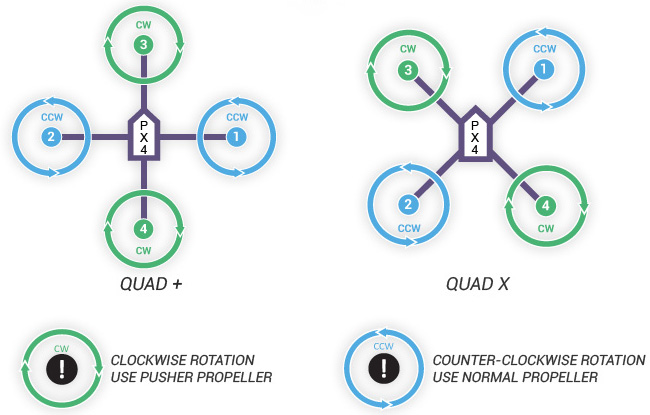
Configuration
Four propellers generate four lift forces
Propellers 1& 2 (CCW) have opposite pitch compared to propellers 3 & 4 (CW)
Rotation speeds / Forces / Moments
movement are controlled by changing the rotation speed of the propellers
- Force F is proportional to square of propeller speed
- mg is the weight of the quadrotor
- Moments generated by the forces are
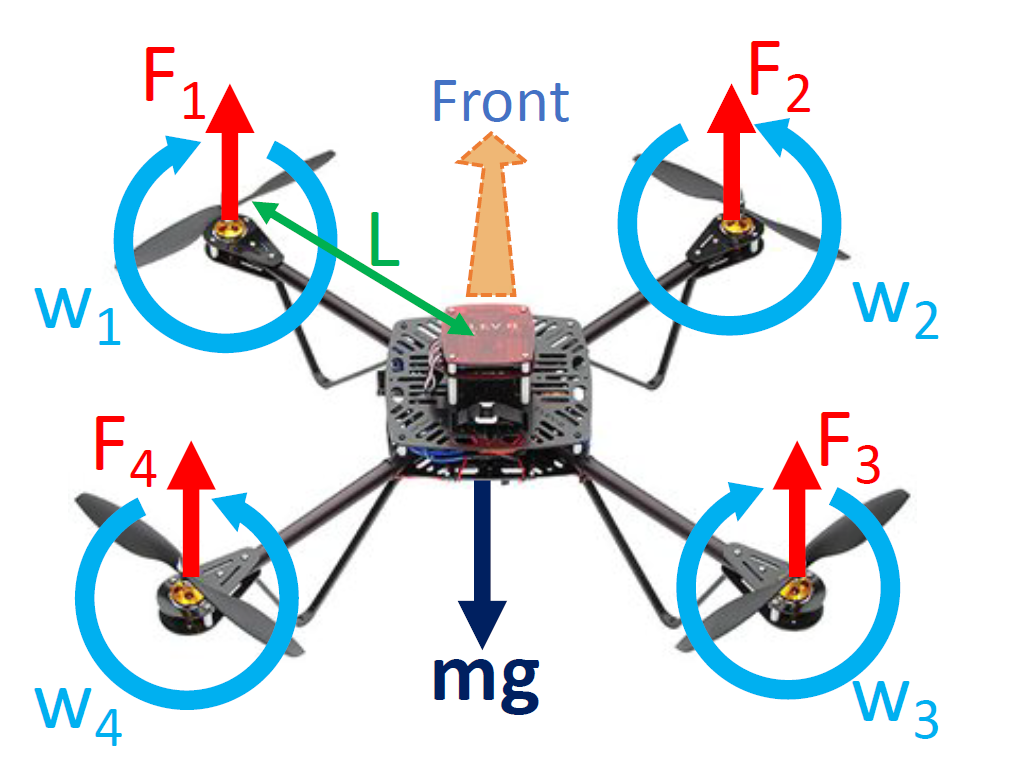
Hover conditions
All forces must be balanced
move up and down
Lift forces must be parallel to gravity
All moments must be balanced
pitch and roll
Rotor speeds must be balanced (torque balanced)
yaw
Flight mechanics
How to move a quadrotor around?
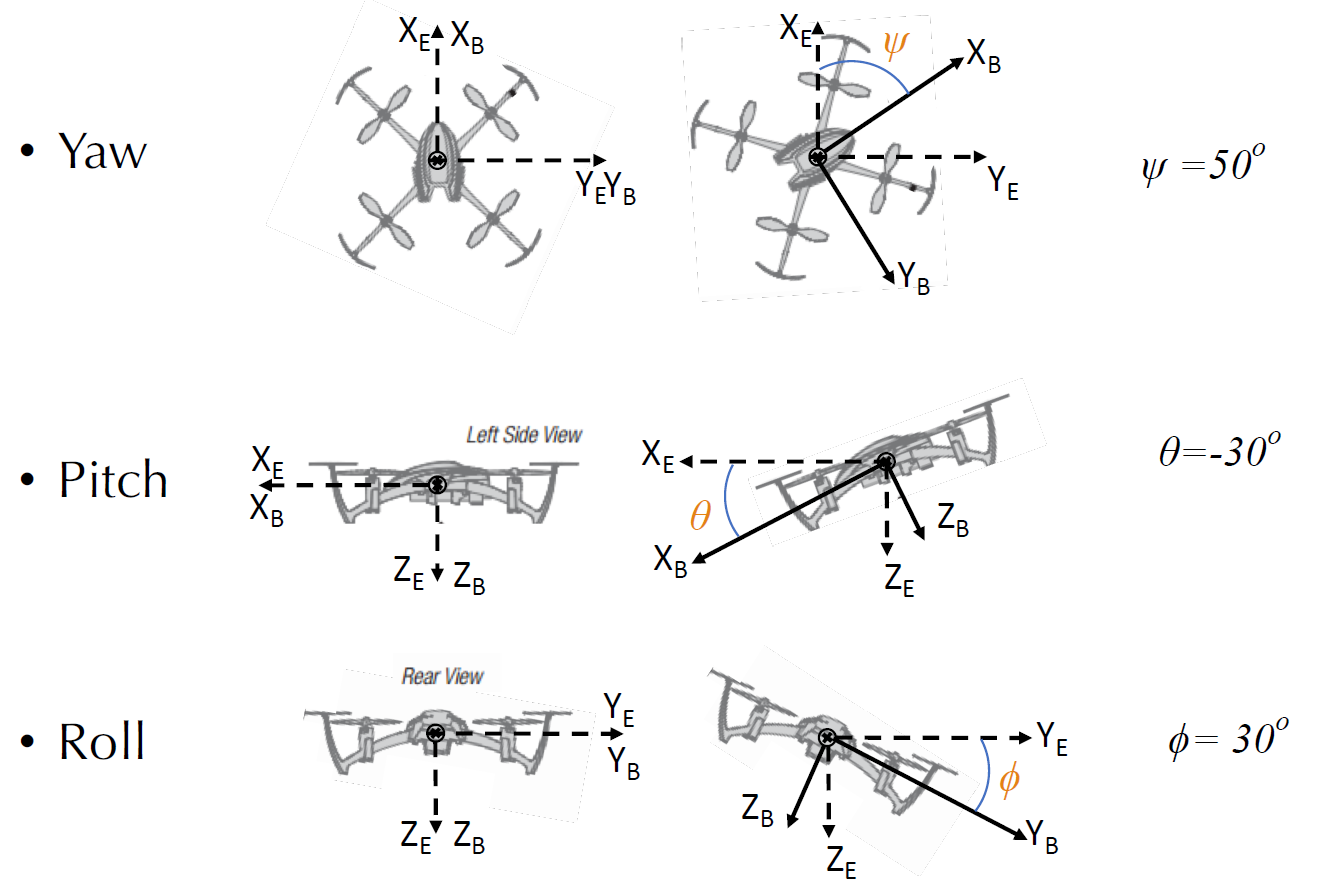
Orientation
Violating one or more of these conditions implies that the quadcopter starts to move
Moving Up and Down
- condition1: Forces Not balanced
Rotating in Yaw
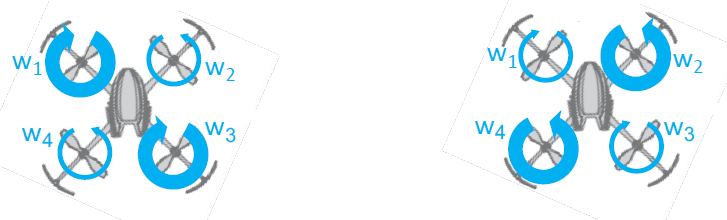
Rotor speeds not balanced (torque balanced)
Note: opposite motor pair should increase/decrease motor speeds to keep hovering, or it will keep flying up!
Rotation in Roll/Pitch
Forces not parallel to gravity
moments not balanced
Summary of equations
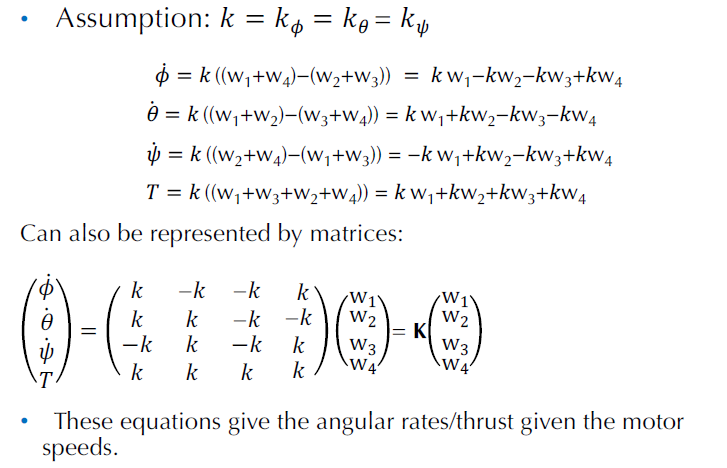
to control the quadrotor state -> setting the rotor speeds for obtaining a desired angular rotation
inverse operation
Example-Translated flight
Moving Forward
Translated flight requires more thrust than hovering, but not always more power (see section 6)!
pitch down: decrease F_1 and F_2
hover: increase F_1 and F_2 to stop rotation
translate: keep balance between mg and thrust
pitch back
Types of Multicopters
main feature; fully actuated multicopters
Configuration
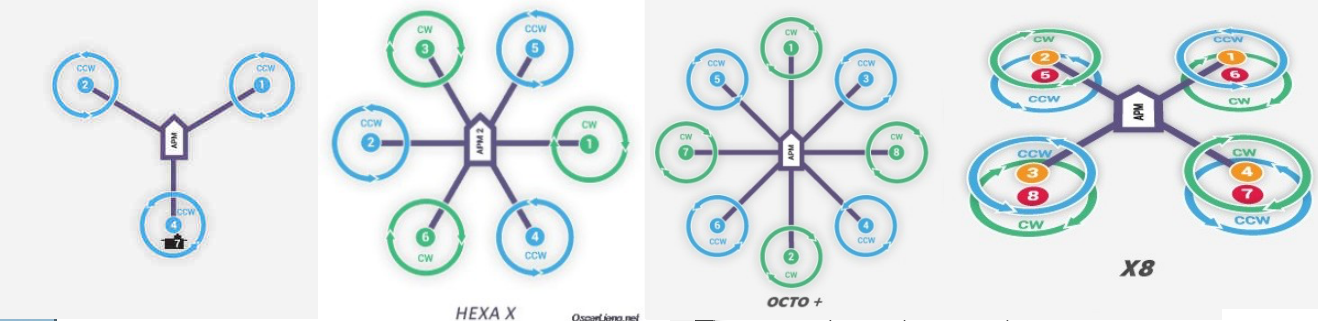
Tricopter
More yaw authority compared to quadcopters
direct control of yaw
More complex mechanical design due to the servo in tail
need additional servo to roll/pitch the back motor
Hexacopter/Octacopter
- More lifting capacity -> more payload
- Redundancy, so robust to failure
- Larger size; expensive
X8 configuration
- More lifting capacity
- More efficiency thanks to the coaxial configurations
Fully Actuated Multicopters
underactuated multicopters -> all propellers are rotated in the same plane
Features
- Rotors disks are in different planes
- Fully Actuated to control 6 DoF (heave, roll, pitch and yaw, x and y translation) by using 6 motors
Pros
- Translational and rotational dynamics are decoupled
- improved robustness to disturbances and to perform complex manipulation tasks
- Possibility to plan more complex trajectories
Cons
- Decreased energetic efficiency
Energetics
What is the power consumption of a multicopter during flight?
How to extend multicopters flight time?
Multicopters have high power requirements
inefficient compared to fixed-wing or flapping-wing aircraft
consume about 200 W/kg on average
Centimeter scale quad with LiPo -> 5-7min
Decimeter scale quad with LiPo ->20-30min
changes corresponding to weather conditions and aggressiveness of flight
Energy in hovering
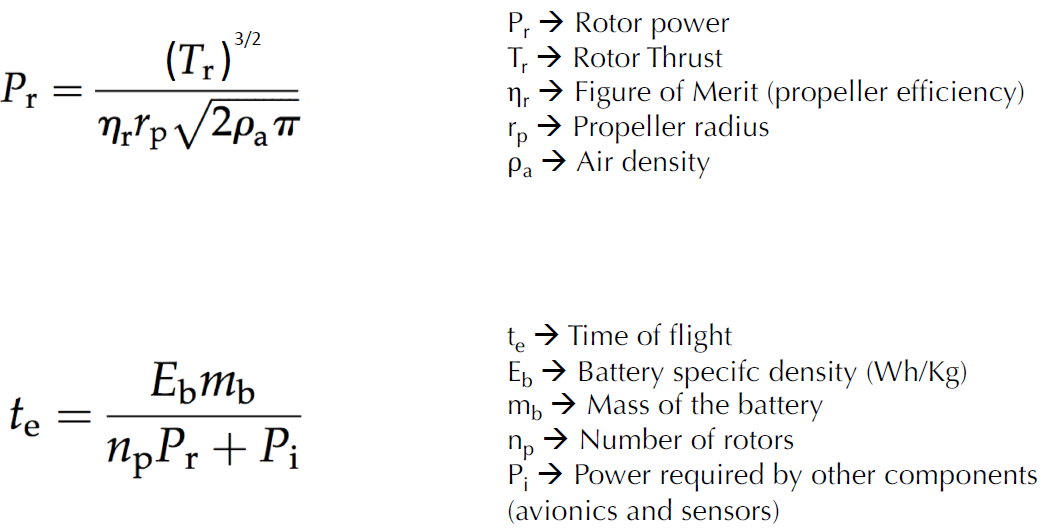
Power calculation of single motor when drone in hovering
- Propeller efficiency ranges from 0.85 to about 0.9
- is the squire root of the disk area
Flight time
- has high variability
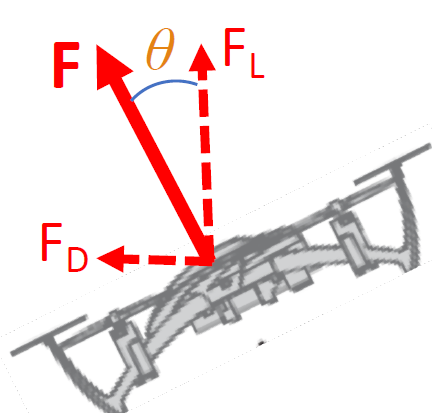
Energy in forward flight of quadcopter
Power consumption during forward flight normalized by the power consumption at hover
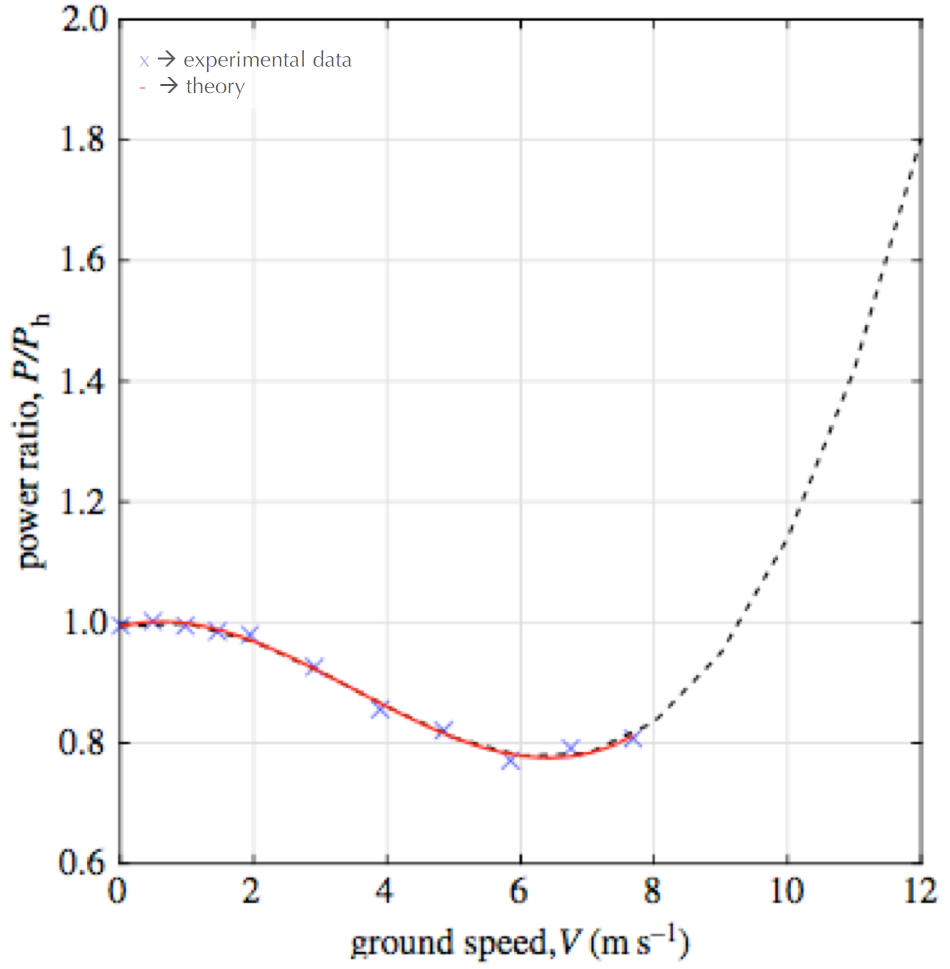
lower power need but higher thrust -> aerodynamics
tilting the quad to the side -> artificially increase the angle of attack -> generate the increase in thrust in the given power
high power ratio again
drag increases quickly again!
Increase flight time
Weight and drag reduction
Increase the specific power of the energy source
switch from LiPo batteries to gasoline (far more energy stored)
Docking station for charging/battery swapping
Tether for power supply
reduce battery
Improving efficiency via mechanical
Energy aware motion planning
reduce acceleration (aggressive flight)
Multi-modal operation
perching; walking and rolling
☑️ Checkpoints
What set of conditions corresponds to hovering in a quadcopter?
Four conditions: balanced weight; parallel to weight; balanced moment (thrust x half frame); balanced rotation speed
What set of conditions corresponds to a rotation around the yaw axis in a quadcopter?
imbalanced rotation speed
How the time of flight of multicopters can be increased?
- Weight and drag reduction
- Increase the specific power of the energy source
- Docking station for charging/battery swapping
- Tether for power supply
- Improving efficiency via mechanical
- Energy aware motion planning
- Multi-modal operation
How the power consumption and total thrust evolve at different forward speeds in multicopters?
first goes down as thus increases when angle of attack increases
then goes down because the drag force increases again
Attitude representations (week2)
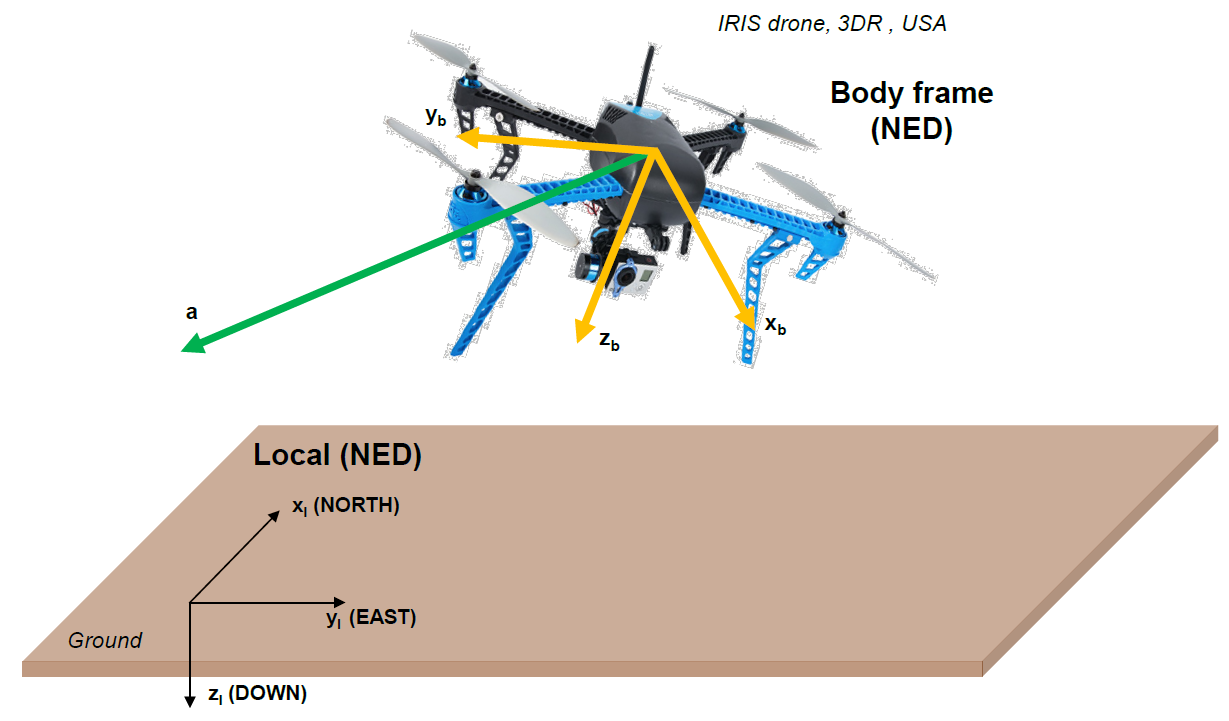
- how to convert state variables from body frame to earth frame
3D Attitude representation- Euler Angles
Rotation matrices can be parametrize by Euler Angles
- Roll : rotation around x
- Pitch : rotation around y
- Yaw : rotation around z
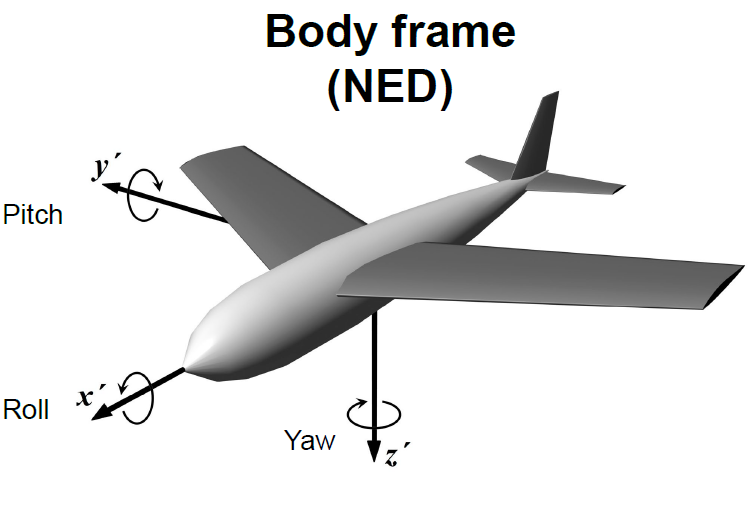
Yaw-Pitch-Roll rotation matrix (Z,Y,X) or Heading-Pitch-Roll (h-p-r)
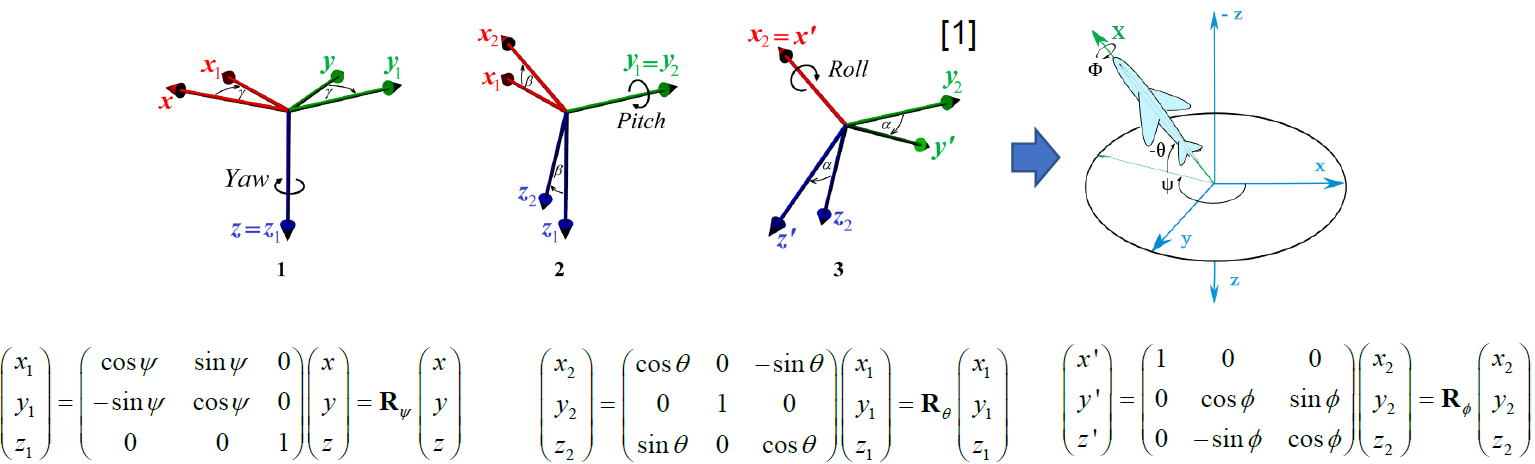
can be summarized as (左乘)
🚧 Claw Example
rotation + translation
补充示例!!!
Issues: gimbal lock problem
sensitive to singularities-when pitch angle is 90 degrees, roll and yaw rotations give the same sensor readings
lost 1 DoF
fail to produce reliable estimates when the pitch angle approaches 90 degrees.
can only be solved by switching to a different representation methods, for example quaternions
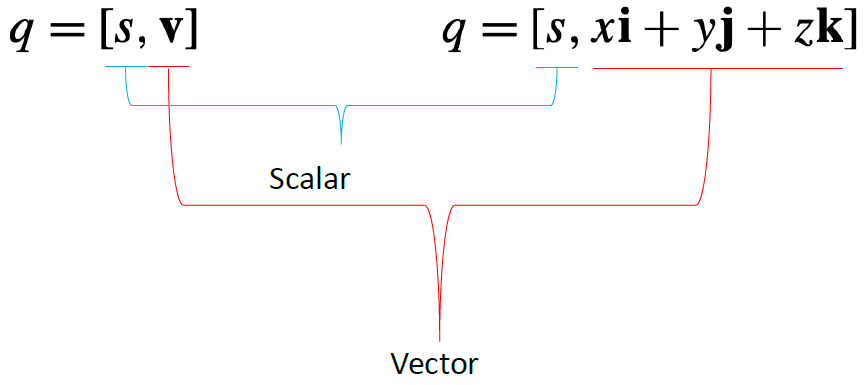
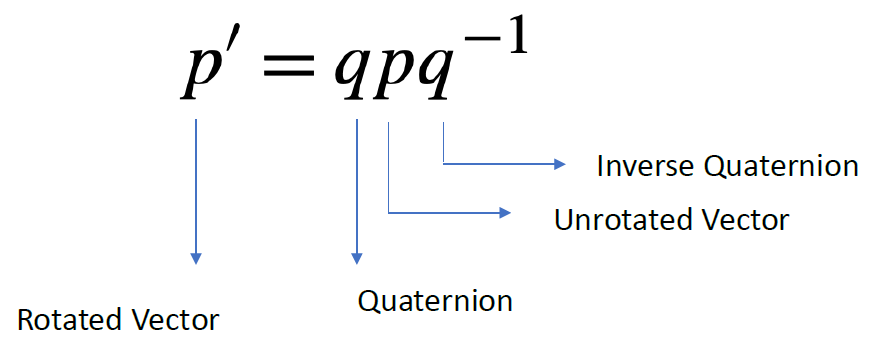
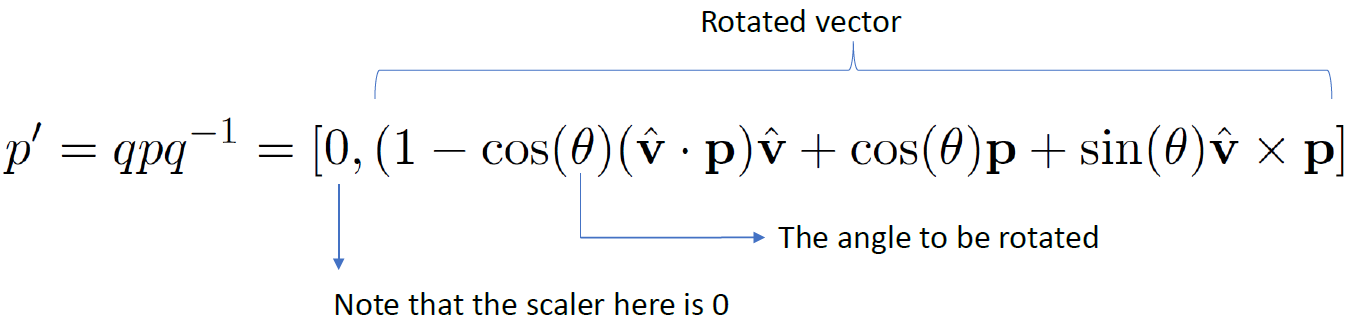
Quaternion
the union of scalar and vector
rotation vector = quet * vector * quet^(-1)
vector in 3-space
Must meet these requirements
;
multiplication
works for relative to x axis ()
week2_quaternion_mat.png
🚧 Claw Example
rotation + translation using quaternions
Conversion
- Euler angles to quaternion
- Quaternion to Euler angles (arctan2 is recommended)
Complex examples
frame: image/centered -> camera -> gimbal -> body -> local
🚧 注意谁相对谁!!!
✖️ Checkpoints
- nothing left in this course
Control (week2&3)
结合exercise进行再次查看
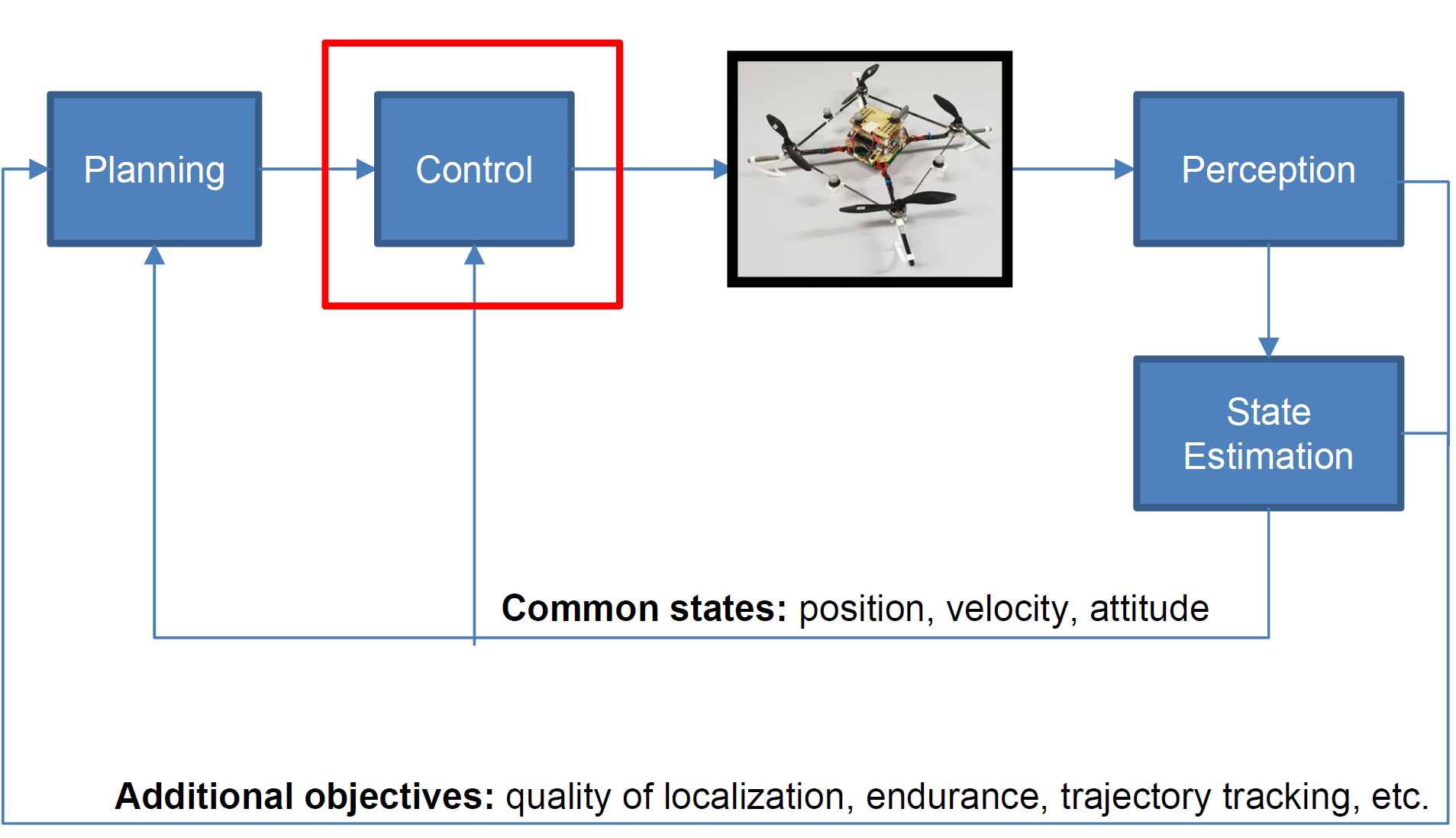
Cascaded control Architecture
drone architecture
communication: glue to connect different parts (FCU to onboard computer to ground station)
PID controller
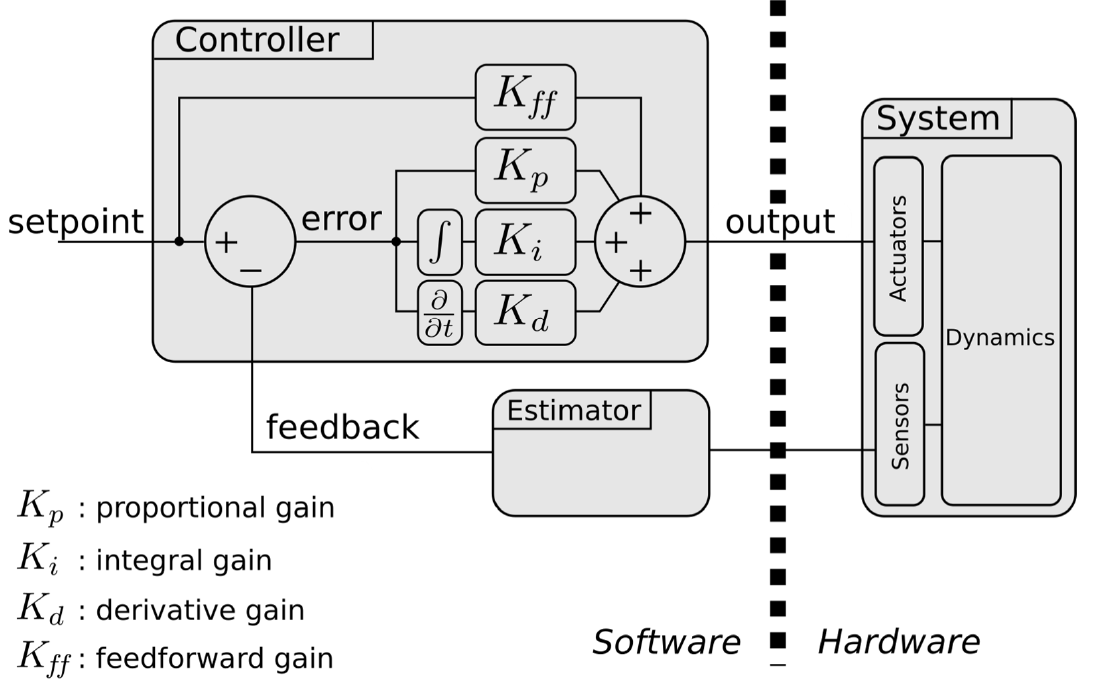
Open-loop
Feedforward control
- responds to its control signal in a pre-defined way
- based on a previous knowledge of the system
Feedback control
control example
Examples Free-flight glider Passively stable helicopter Racing drone Autonomous Delivery drone Sensors None None IMU IMU + GPS + Vision + Mag Controllers None None (Attitude), Rate Position, Velocity, Attitude, Rate Setpoint None Manual actuator setpoint Manual rate setpoint Autonomous navigation/Manual challenges
- underactuated system for quadcopter
- approximate aerodynamic model
- control inputs are idealized (the real model of the motors can be quite hard to model)
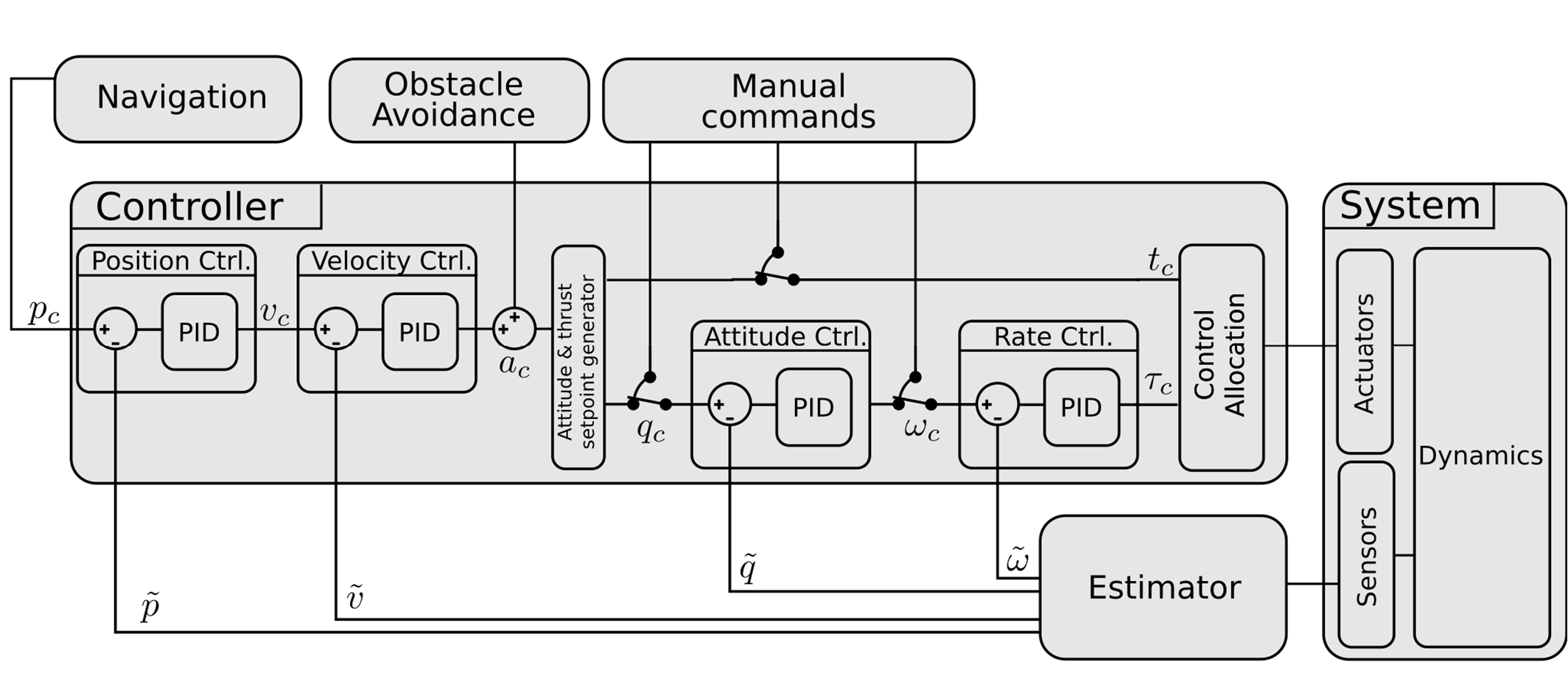
features
- insert the obstacle avoidance together with velocity setpoint
- manual commands send thrust and attitude rate commands
- the lowest level of the controller, the higher bandwidth it needs
Pros
Decouple translational and rotational dynamics
Facilitate implementation of the controller
implement one by one
Better failure diagnosis capability
modular control architecture for debugging them one by one
Question: why a more advanced controller?
- linear assumption vs nonlinear system
- more advanced system can bring optimal performance
Control allocation
convert thrust & torque setpoint into actuator commands
account for different geometries
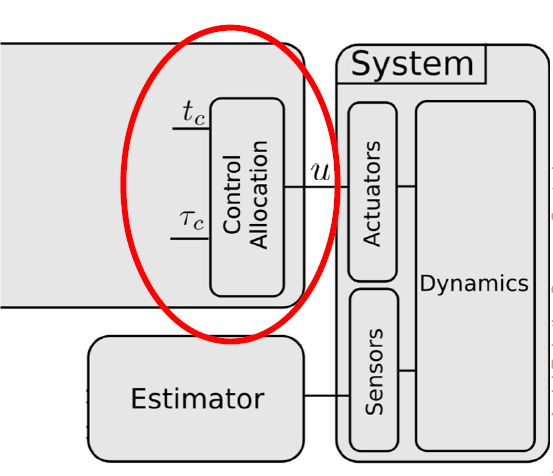
from thrust & torque setpoint into actuator
: actuator commands (Nx1)
moment setpoints (3x1)
thrust setpoint
Method
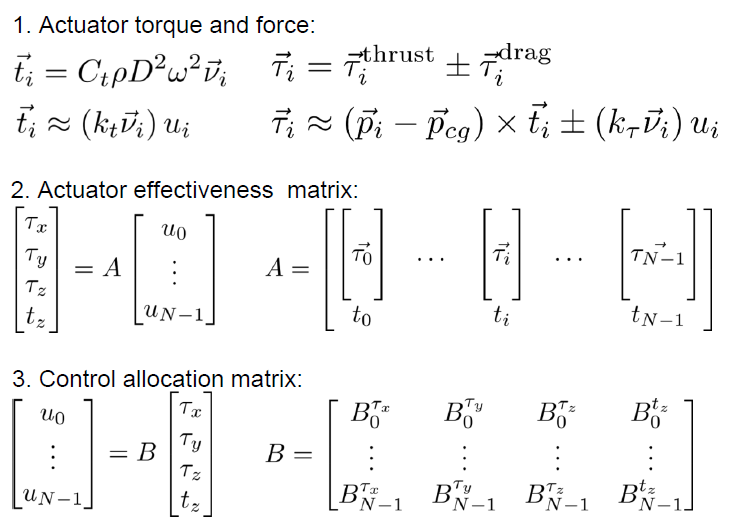
Compute generated force and torque of each actuator
Build matrix "Actuator Effectiveness"
Compute allocation matrix B as the pseudo-inverse of A
not always square, so using pseudo-inverse ()
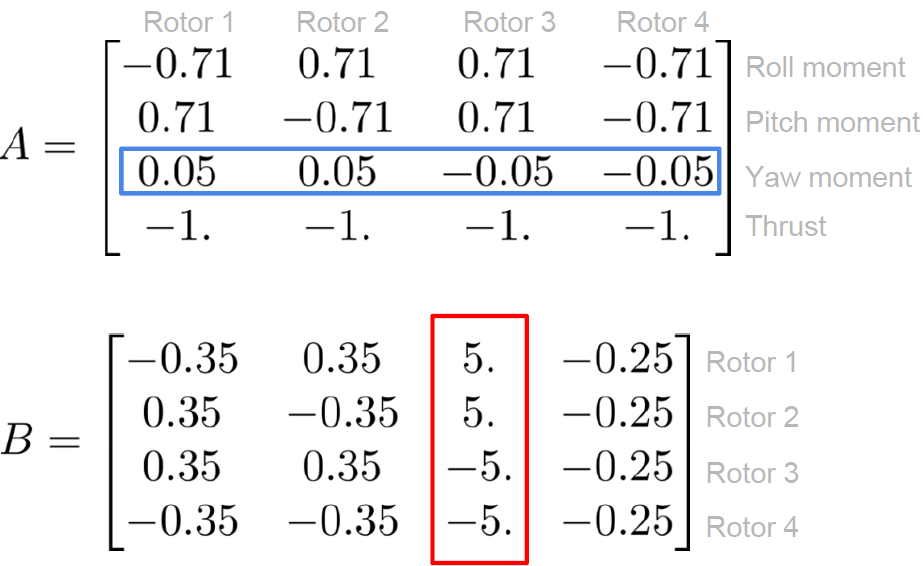
Remark
less effective at producing yaw torque
yaw torque requires more actuator effort than roll and pitch torque
Rate control
Input body rate setpoint -> Output torque to each angle rate
Attitude control
Input quaternions setpoint -> Output torque to each angle rate
How to compute the quaternion error
axis error
Full quaternion based attitude control for a quadrotor
Fresk, E. and Nikolakopoulos, G., 2013, July. Full quaternion based attitude control for a quadrotor. In 2013 European control conference (ECC) (pp. 3864- 3869). IEEE.
without any transformations and calculations in the Euler’s angle space
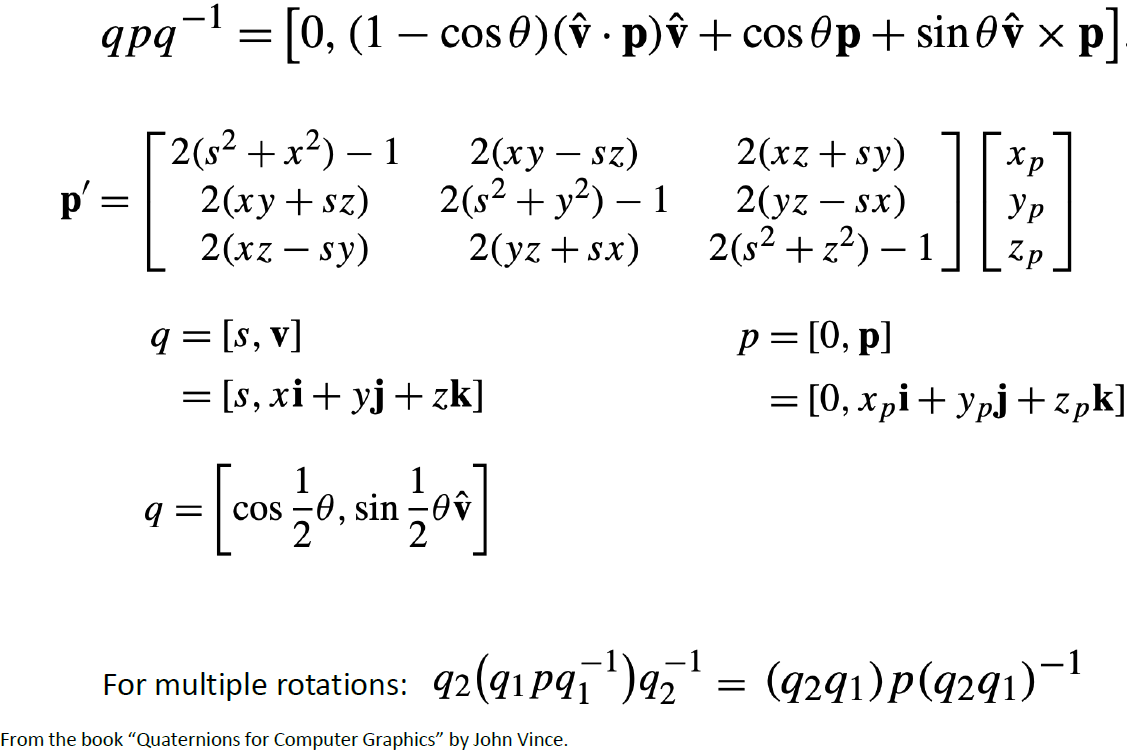
quaternions
scalar + vector part
Multiplication of two quaternions p, q is being performed by the Kronecker product
represents the combined rotation
quaternion multiplication is non-commutative 不遵循交换律
All quaternions are assumed to be of unitary length 单位长度
The complex conjugate of a quaternion has the same definition as normal complex numbers 复共轭
if the length of the quaternion is unitary then the inverse is the same as its conjugate 逆即是复共轭
Rotation transformation is built by two quaternion multiplications-the normal and its conjugate
rotates the vector v from the fixed frame to the body frame represented by q
where can be rewritten as location in x, y and z axis. For example,
is the rotation axis (unit vector) and is the angle of rotation
Calculating quaternions error dynamics
desired , measured , error --multiplying the reference with the conjugate of the estimated quaternion in Kronecker
Angular errors: the reference is demanding a rotation more than π radians, the closest rotation is the inverted direction and this is found by examining q0. If q0 < 0 then the desired orientation is more than π radians away
其中sgn函数就对应着计算的正负
Control strategies for multicopters
- Inner loops for attitude dynamics stabilization
- Outer loops for translational dynamics
Linear
Examples
- Proportional Integral Derivative (PID)
- Linear Quadratic Regulator (LQR)
- LQG
Features
- a linear approximation of the system dynamics
- used when the attitude of the multicopter involves angles that are close to zero
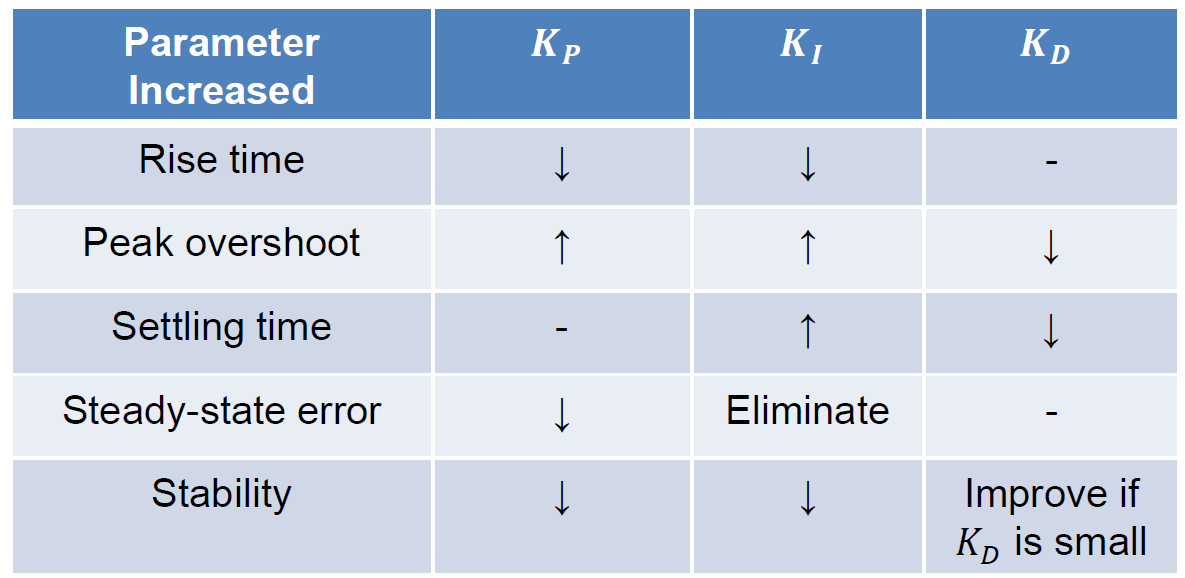
PID controller
Pros: Easy to design; Intuitive to tune manually (not necessarily easy on a real drone)
Cons: Imprecise nature of the model due to inaccurate modelling; Limits the performance
Effects of increasing a parameter independently
LQR/LQG
Features
- a multirotor (linearized around an equilibrium point) by minimizing a suitable cost function
- Pros: optimal control method and better than PID (LQR); not need complete knowledge of the state and can rely on estimator/observer (LQG)
- Cons: requires tuning of Q and R Matrixes
Practical example-Foldable Drone
- Attitude control (providing torques) requires adaptation since morphology has an impact on the rotation dynamics
- should update matrix matrix A during flight
Effect of Q and R matrixes
- design parameters to penalize (1) the state variables and (2) the control signals
- Large value: stabilize the system with less change in State (Q) and Control input (R)
- Small value: stabilize the system without “caring too much” about ...
Nonlinear
Examples
- Model Predictive Control (MPC)
- Artificial Neural Networks
Features
- The stability domain of a drone controlled with a nonlinear controller can be bigger
- a better model of the drone can lead to better performances
- allows to take explicitly into account aerodynamic effects and forces acting on the drones
An introduction to fully actuated multirotor UAVs
conventional ones have coupling between the horizontal translational and rotational dynamics
fully actuated can help decouple translation and rotation; have direct control to corresponding DoF
key: allocation matrix changes
Fixed-tilt
easier controller; don't need additional motors; lightweight; cannot achieve optimal performance
Variable-tilt: change tilt of propellers to achieve desired motion
can achieve optimal configuration in given task but with complex mechatronics and control
☑️ Checkpoints
What is the size of the control allocation matrix of an hexacopter with 4 controlled degrees of freedom?
hexacopter 六轴,6motors
Effectiveness matrix: 4x6
Controller allocation: 6x4
Output: 6 motors; input B x (3torque + 1thrust)
最底层的控制,就是输入是torque+thrust,输出是n个电机的转速
Effectiveness: transformation relationship to torque and thrust for each rotor
Why do we use the pseudo inverse instead of standard matrix inverse to compute the control allocation matrix from the actuator effectiveness matrix?
there existing other layout of multicopters except for quadcopters with 4 rotors
What happens when a rate setpoint [0 0 1] is applied?
rotate counterclockwise with 1 rad/s in yaw angle
What are the input and output of the rate controller?
Input: angle rate setpoint + estimated angle rate
Output: generated angle torque
What happens when an attitude setpoint [0 0 pi/2] is applied?
rotate counterclockwise with pi/2 in yaw angle
What are the input and output of the attitude controller in a cascaded architecture?
Input: desired quaternion setpoint + estimated quaternion
Output: generated angle rotation rate
How to compute attitude error quaternion from the estimated attitude quaternion and the attitude setpoint quaternion?
compute quaternion error
calculate angular errors
State Estimation (week3&4)
Introduction to State Estimation
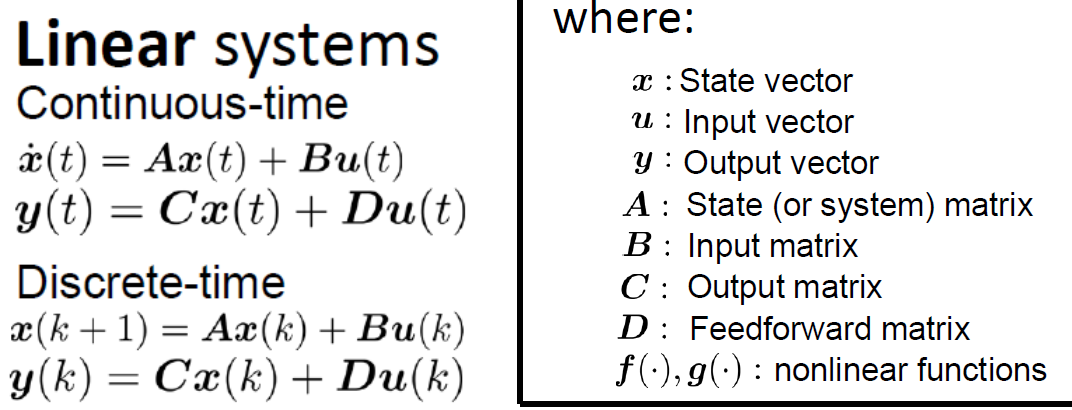
- STATE: variables used to describe the mathematical state of a dynamical system
- ESTIMATION: finding an approximation of state variables even if the data is incomplete, uncertain, or unstable
- estimate something which you can not see or measure directly
Why State Estimation in Robotics?
Perfect model & sensor are not available; Errors exist in both sensors & models
- State of the robot (proprioception)
- State of the environment (exteroception)
State Estimation on Aerial Robots
Height; Attitude; Angular velocity (Most important as they are the primary variables used for the stabilization of the UAV); linear velocity
main sensors
- Inertial Measurement Unit (IMU)
- Height Measurement (Acoustic, infrared, barometric, laser based)
- Others: Global Navigation Satellite System (GNSS, outdoor) or VICON (indoor); Camera, Kinect, LIDAR
Estimation for deterministic systems
State Observer (or Luenberger Observer)
- minimize the error between measured and estimated values
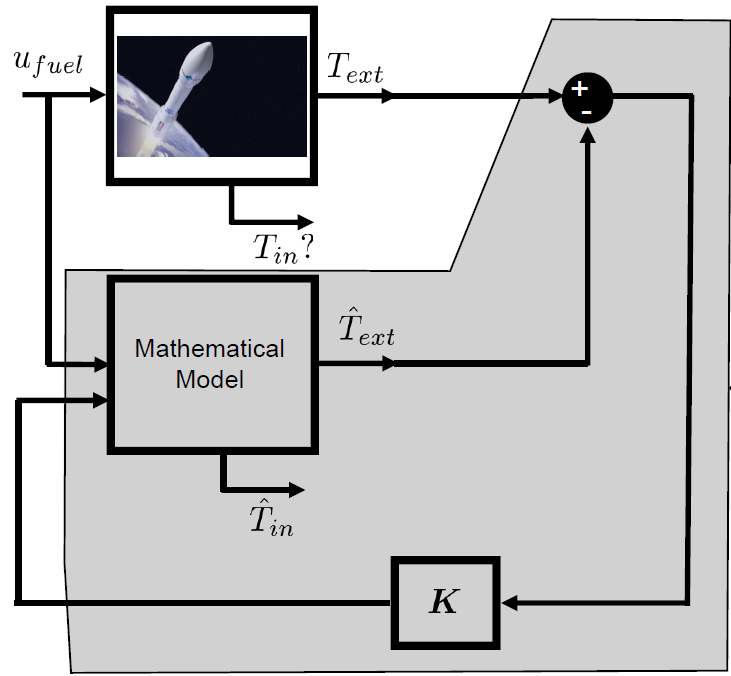
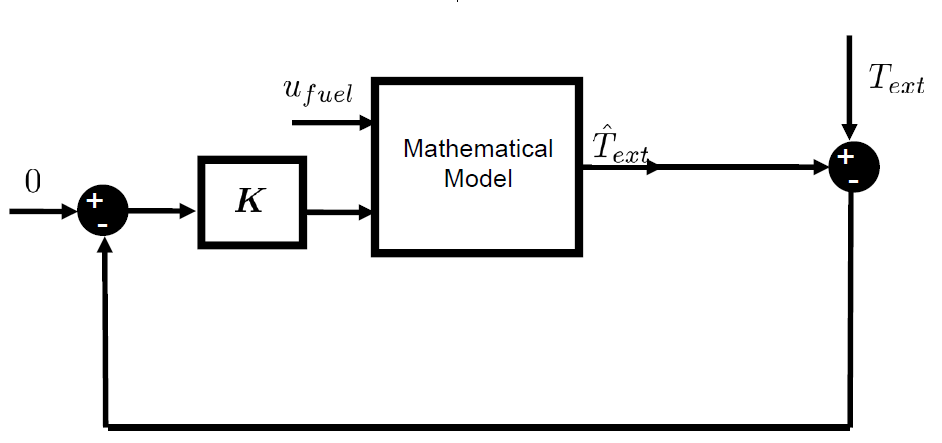
- how do we choose the “feedback loop” gain K ?
Dynamical Systems
Estimation error
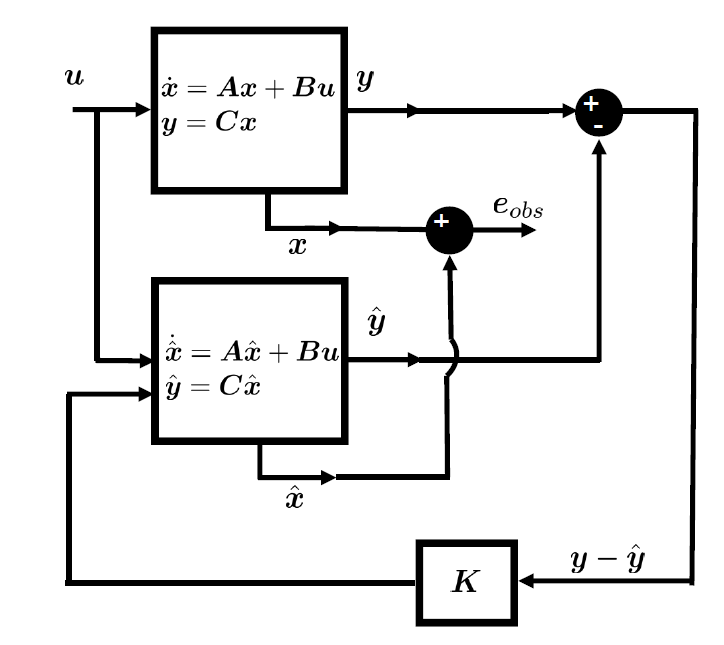
observer error
=>
with linear model
if A-KC <0, the error will lead to 0 when t -> infinity
How to choose K?
- gives control on the decay rate of the error function
- similar to P gain in control (if too big, estimation will oscillate)
State Estimation for stochastic systems
Recap of fundamental concepts
Mean and variance encode the a‐priori knowledge of the random variable
- w: Process noise
- v: Measurement noise
What is the a‐priori information about uncertainty in our problems?
W/V are known but w/v are zero-mean
- W: covariance matrix associated to process noise
- V: covariance matrix associated to measurement noise
What is the statistical independence among the values of a random variable in time?
white noise stochastic processes -> 期望值都是0
Kalman filter (KF)
example: estimate drone’s roll angle
- x: Drone’s roll angle
- u: Roll Body rate
- y: Drone’s roll angle (through IMU)
- : process error (only in the dynamics not in estimator!)
- : measurement error (only in the dynamics not in estimator!)
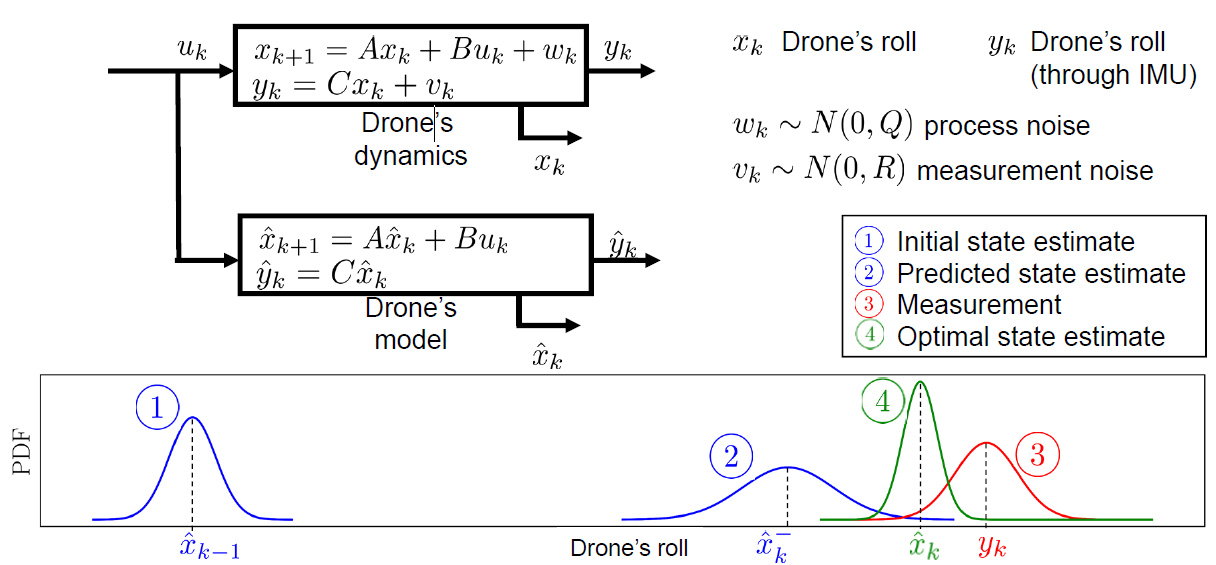
- initial state estimate
- -> predicted state estimate
- + measurement
- => Optimal state estimate
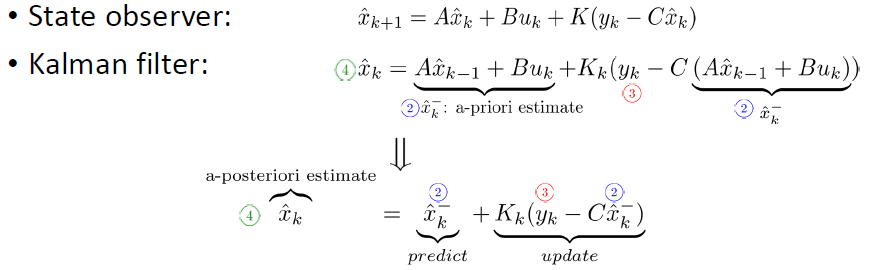
Prediction (A-Priori) + Update
use Gaussians to implement a Bayesian filter. That’s all the Kalman filter is - a Bayesian filter that uses Gaussians
PREDICTION
state
error covariance
keep track not only the state but also the covariance (will keep increase)
UPDATE
KF Gain
trust more in model y_k
R-> 0 => K_k = 1/C => x_k = y_k/C
trust more in measurement x_k
P_k -> 0 =>K_k = 0 =>x_k = x_k^{_}
Update state
minimize the Covariance
sensor fusion on a quadrotor
use multiply KF to achieve better estimation
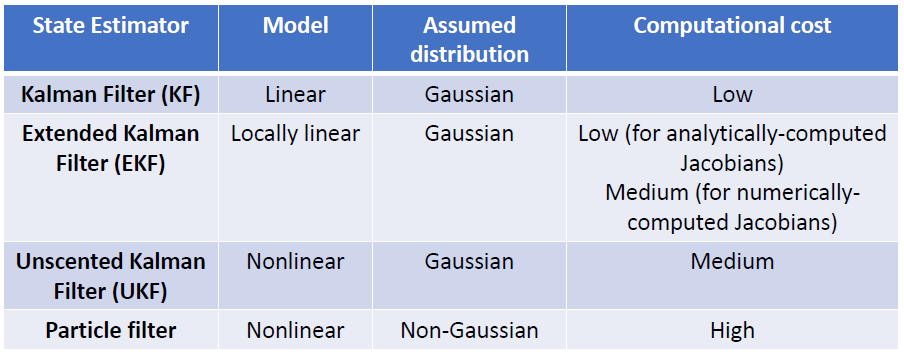
Intro to EKF, UKF and particle filters
EKF
- linearizes the nonlinear function around the mean of the current state estimate
Overview
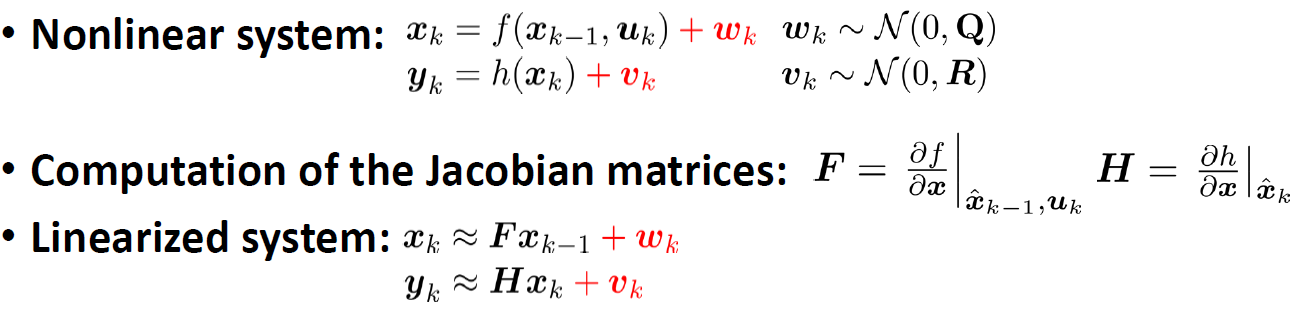
- applied to nonlinear system
- linearize around the state estimate value by computing Jacobian matrices
Equations
Predication
F-Computed Jacobian matrix
Update
Near optimal Kalman Filter gain
UKF
- take several points to compute/approximate probability distribution
- choose sigma points according to algorithms
Particle filters
Combines the results to estimate the mean and covariance of the state
!computationally intensive
Different UKF
- Not limited to a Gaussian distribution
- points are chosen randomly
State Estimation in aerial robotics
in lab settings
- use MoCap to estimate position and velocity
Outdoor
- Camera, Depth camera Sensor, ToF Range Sensor to estimate pose and height
☑️ Checkpoints
What structure does the Luenberger Observer remind you?
closed-loop estimation for deterministic systems
What does the Kalman Filter (KF) gain do?
determine to trust either more on measurement or a-prior/model
For which kind of dynamical systems the KF is useful?
linear continuous system
!cannot work in discontinuous system
What do we need to know a-priori if we want to apply the KF?
state mean and error covariance
What are the advantages/disadvantages of the UKF w.r.t an EKF?
EKF
- need linearization
- Not an optimal estimator (especially nonlinear)
- may quickly diverge (when incorrect model/wrong covariance init)
- may difficult to compute Jacobians
What are the advantages/disadvantages of a particle filter w.r.t an UKF?
PF
- Not limited to a Gaussian distribution
- need more points → more computational time
- More accurate as long as having enough particles
🚧 Navigation (week5)
Velocity control
- 🚧 如果低速飞行,不去调整yaw,不然可能会引起震荡!
Waypoint Navigation
Dubins Paths
Vector fields
☑️ Checkpoints
Which component of the acceleration setpoint is converted to roll angle? To pitch angle?
- roll
- pitch
Why is navigation based on fixed position setpoint inappropriate for fixed-wing drones?
- cannot do sharp turning
What type of segment compose a Dubins path?
- arcs of a minimal radius
- straight lines
In which case can we construct a RLR Dubins path?
distance of waypoints is less than the minimal diameter
What happens when centrifugal acceleration is not taken into account in the formulation of a circle following vector field?
It will not follow the vectors and cross the circle lines
🚧 VIO & SLAM (week5)
VIO
SLAM
☑️ Checkpoints
What is VIO/SLAM useful for?
VIO: Visual inertial odometry
process of estimating the drone state (position, orientation, and velocity) by using only the inputs from Camera(s) and IMU(s)
SLAM: Simultaneous Localization and Mapping
What are the sensors that can be used to do VIO/SLAM?
Camera(s) and IMU(s)
What is loop closure?
the recognition of when the robot has returned to a previously mapped region and the use of this information to reduce the uncertainty in the map estimate.
What are the main three VIO paradigms?
Filters
- Restrict inference process to latest state of the system
Fixed-lag smoothers
- Restrict inference process to a given time window
Full smoothers
- Estimate the entire history of the states
- More accurate
- Real‐time operation can become unfeasible
Why do we use a camera and an IMU for VIO?
Cheap and complementary to each other
Camera: Precise during slow motion and provide rich information
Limited output rate; Not robust to scenes with low texture, high speed motions
IMU: Scene independent and High output rate
Poor signal-to-noise ratio at low accelerations and angular velocities; Estimated motion tends to accumulate drift quickly
Fixed-wing drones (week6)
Introduction
Structure
Flight Mechanics
Control surface
Ailerons
- attached to the outboard trailing edge of both wings
- rotate the aircraft around the longitudinal axis (roll)
elevators
- hinged to the trailing edge of the horizontal stabilizer
- around the horizontal or lateral axis (pitch)
rudder
- hinged to the trailing edge of the vertical stabilizer
- causes an aircraft to yaw or move about the vertical axis
Stability
longitudinal -> pitching
lateral -> rolling
directional -> yawing
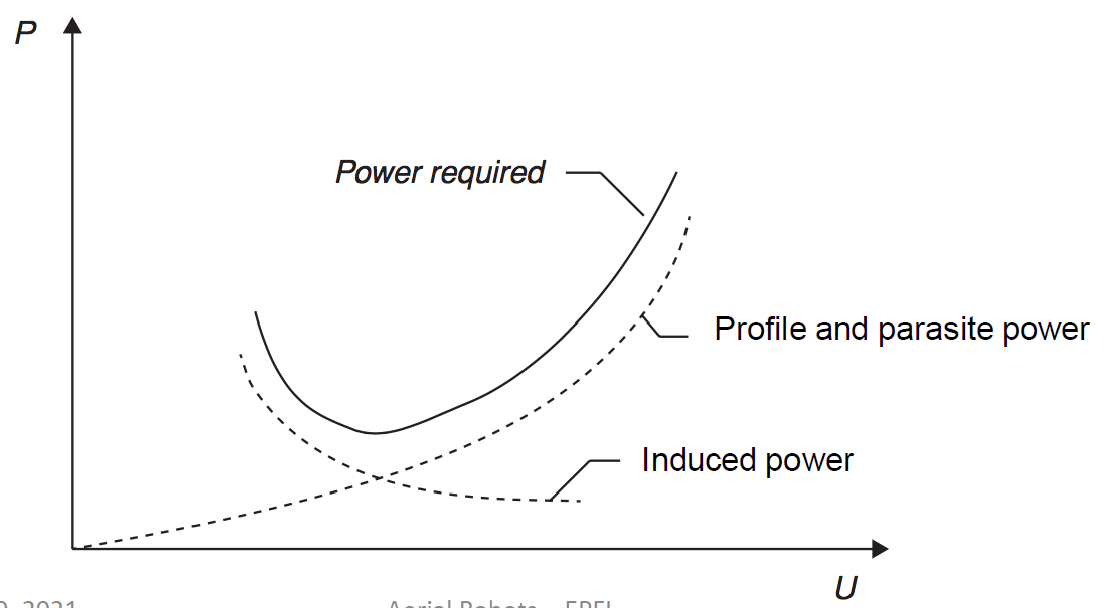
Energetics
Induced power
- Induced drag is the drag on the wing that is due to lift
Profile and parasite power
- The total aerodynamic power is obtained by multiplying the drag force by the forward velocity
☑️ Checkpoints
What are the main flight control surfaces in fixed-wing aircrafts?
Ailerons
- attached to the outboard trailing edge of both wings
- rotate the aircraft around the longitudinal axis (roll)
elevators
- hinged to the trailing edge of the horizontal stabilizer
- around the horizontal or lateral axis (pitch)
rudder
- hinged to the trailing edge of the vertical stabilizer
- causes an aircraft to yaw or move about the vertical axis
What are the main stabilization strategies in fixed-wing aircrafts?
Longitudinal stability
making CoG ahead of the aircraft
Lateral stable
- Dihedral angle 翅膀上扬
- Keel effect and Weight distribution
Vertical stability-pitch
making the side surface greater than ahead of the center of gravity
How is a flying wing/Tailless aircraft controlled and stabilized?
- upward reflex (上扬边缘) or elevons (ailerons+elevator) keeps pitch in equilibrium
What are the main contributions to power consumption in fixed-wing aircrafts?
Pressure drag + Friction drag
Induced drag + Profile drag (wing) + Parasite drag (body)
Induced drag(powers proportional to 1/v)
drag on the wing that is due to lift
Profile drag, Parasite drag (powers proportional to v^3)
Aerial Swarms (week7)
Intro
Drone light shows
Centralized = agents transmit individual position to ground computer and receive next location
Collective Motion in nature
Decentralized = agents rely on local information and computation
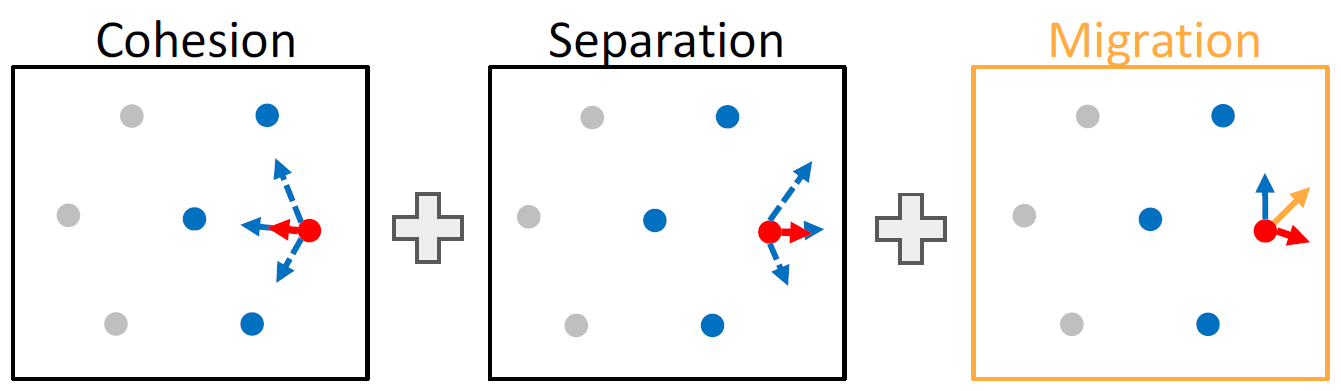
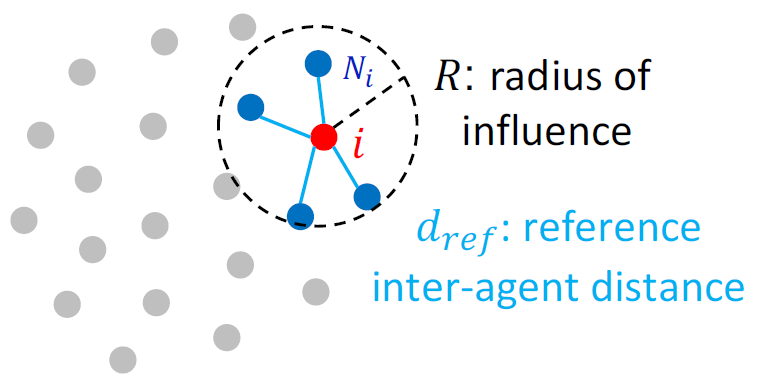
Reynolds flocking algorithm (Reynolds, 1987)
- radius of communication or neighborhood R
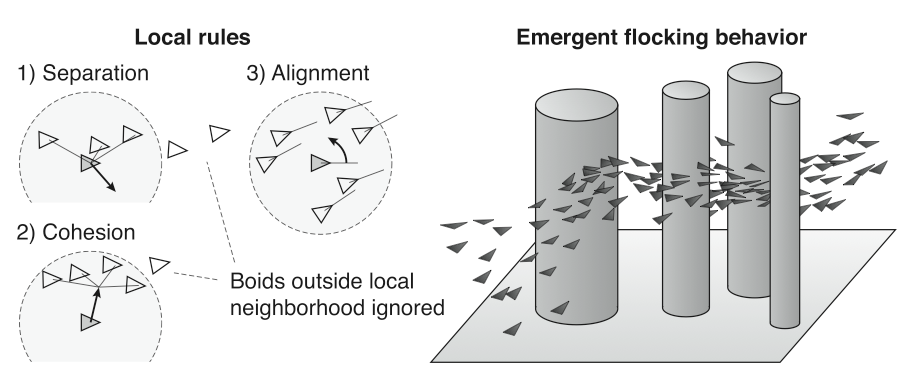
- Separation: avoid collision
- Cohesion: attempt to keep close
- Alignment: attempt to match velocity
Reynolds flocking: model
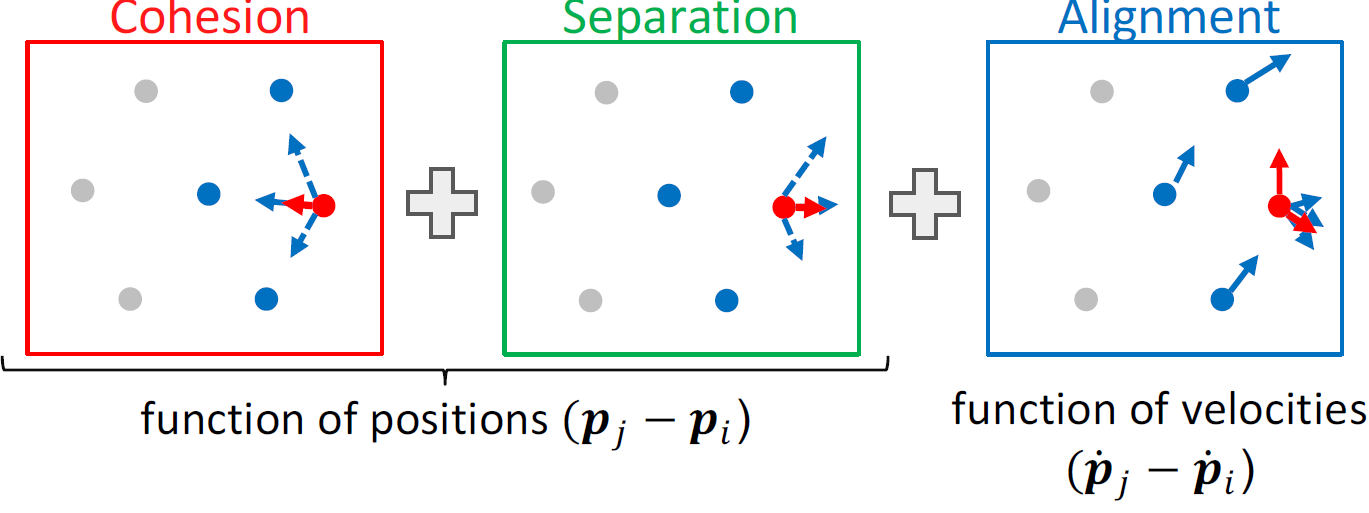
Equations
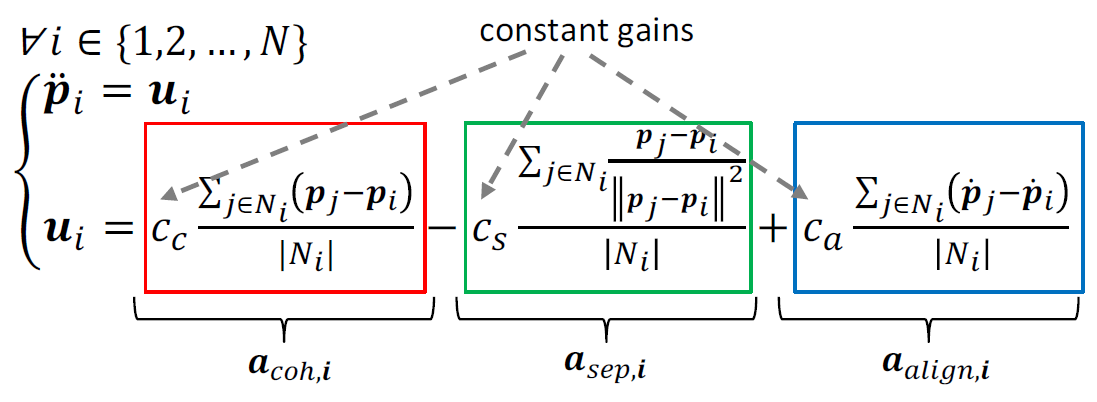
- Set of agents in neighborhood
- identity of -th agent
- position
- velocity
- acceleration = control command
- acceleration term due to the cohesion/separation/alignment , , and
- constant gains corresponding to the cohesion/separation/alignment , , and
Equilibrium
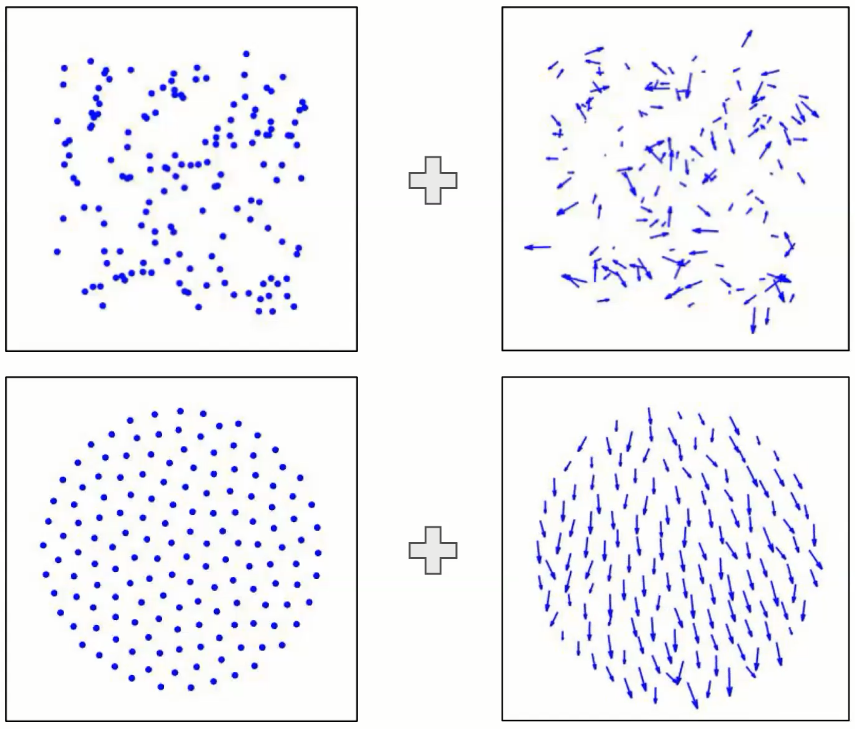
Positions converge to a lattice formation (晶格式)
Velocities converge to the average of initial velocities
Reynolds flocking with migration
new migration rule steers the swarm towards a desired direction
- replaces the alignment rule
- cohesion and separation rules are kept to regulate the agents distances
Equation
,
parameters
- migration velocity
- Denominator = 1 since neighbors are not relevant for migration
Case: Aerial swarms for disaster mitigation
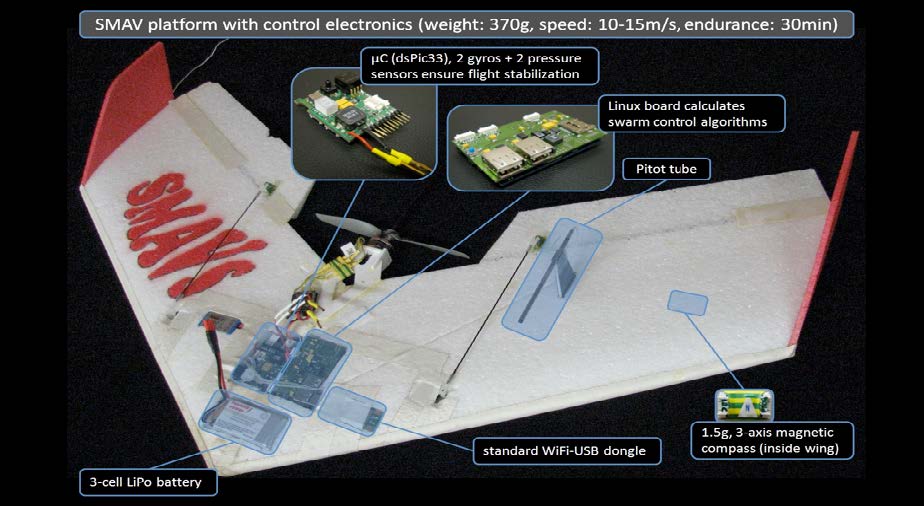
SMAV platform with control electronics
Communication radius and turning angle
- large communication radius -> can make sharp turn together because of knowing the position of other robots
- smaller communication radius -> may separate and gather into a flocking often
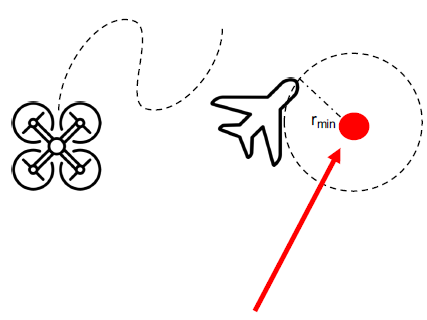
Virtual agents for flocking with fixed-wing drones
Winged drone flies around Virtual Agent which moves according to Reynolds rules
Varga et al., Distributed Formation Control of Fixed Wing Micro Aerial Vehicles for Uniform Area Coverage, IROS 2015
video: https://youtu.be/FYsd2VckGA0
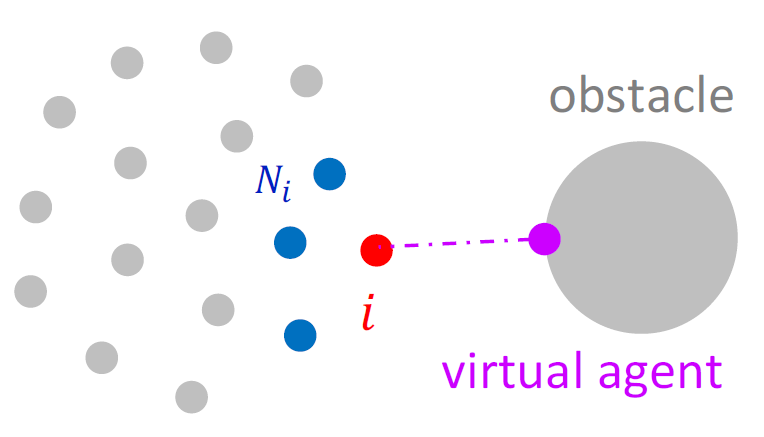
Reynolds flocking with obstacles (Virtual agents)
Obstacles are modelled as virtual agents
- Its position is the obstacle’s closest point to the agent
- Its velocity is perpendicular to the tangent to the obstacle
position and velocity of the virtual agent
Virtual agents exert separation and alignment effects, but not cohesion (not collide with the agent)
Visualization
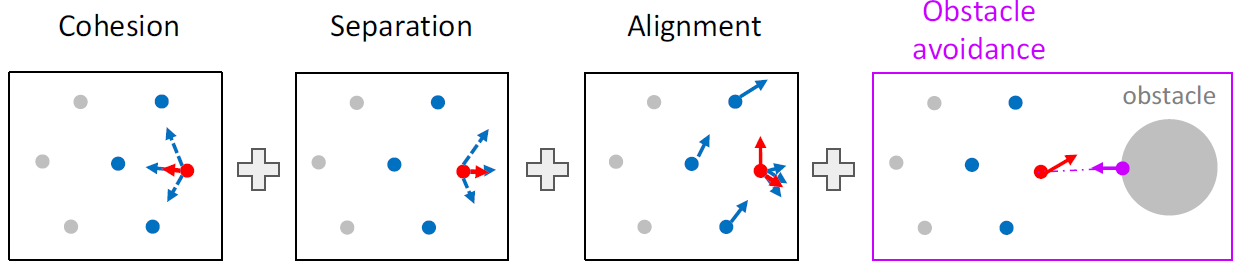
Equation (two extra separation and alignment term regarding obstacles)
Other models
Vicsek model: particles in confined environments (密闭环境)
Vasarhelyi et al., Optimized flocking of autonomous drones in confined environments, Science Robotics, 2019
DOI: http://doi.org/10.1126/scirobotics.aat3536
Video: https://youtu.be/E4XpyG4eMKE
Project web: http://hal.elte.hu/drones/scirob2018.html
Rules
- Separation
- Self propulsion: Makes the agent match a preferred speed
- Friction: Viscosity (internal friction) for alignment and oscillation damping
Equation
The full equation contains 12 parameters and requires heuristic methods for optimization
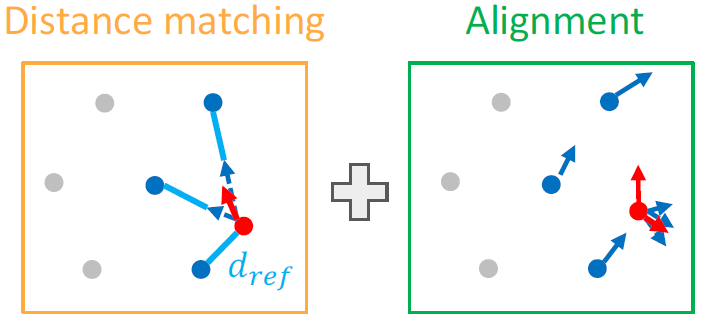
Olfati-Saber model
R. Olfati-Saber, Flocking for multi-agent dynamic systems: algorithms and theory, IEEE Transactions on Automatic Control, 2006
Rules
Distance matching
- Makes the agents match a desired inter-agent distance
- Replaces cohesion and separation rules of Reynolds model
- Mathematically defined as a potential function
Alignment: attempt to match the velocity and direction
Equation
- radius of influence
- desired inter-agent distance
- weighting function
- distance matching function
- gradient, derivative in three dimensions
distance matching example
Components
- weighting function 越近影响越大
- distance matching function 越靠近越小,线性
- Result: potential function
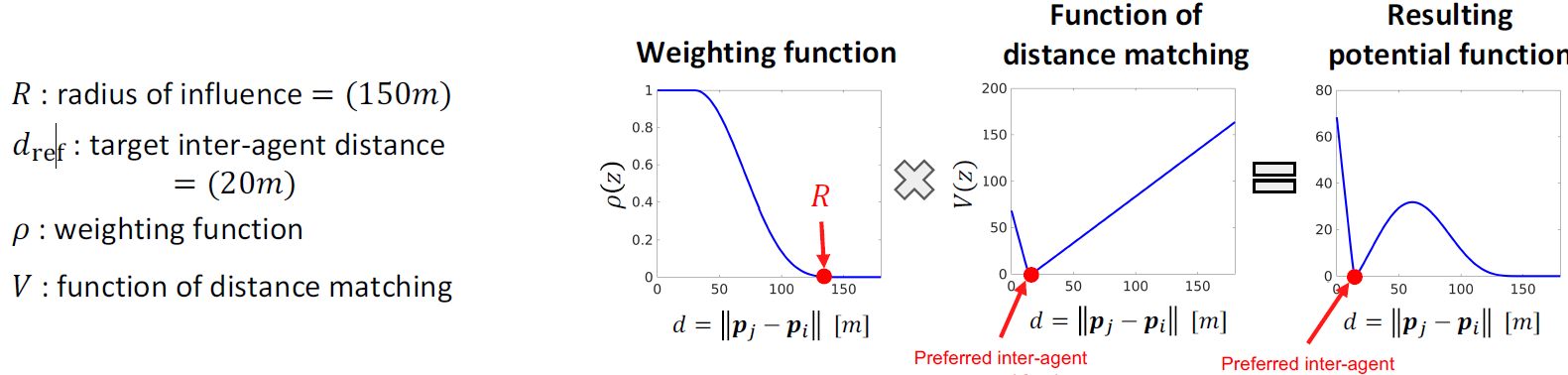
Note
- Principle of minimum potential: minimum defines the stable equilibrium of the system
- is a stable equilibrium
- The force acting on an agent is zero in the minimum of the potential. For , it holds
Drone Swarms
Coppola et al., A Survey on Swarming With Micro Air Vehicles: Fundamental Challenges and Constraints, Front. Robot. AI, ‘20
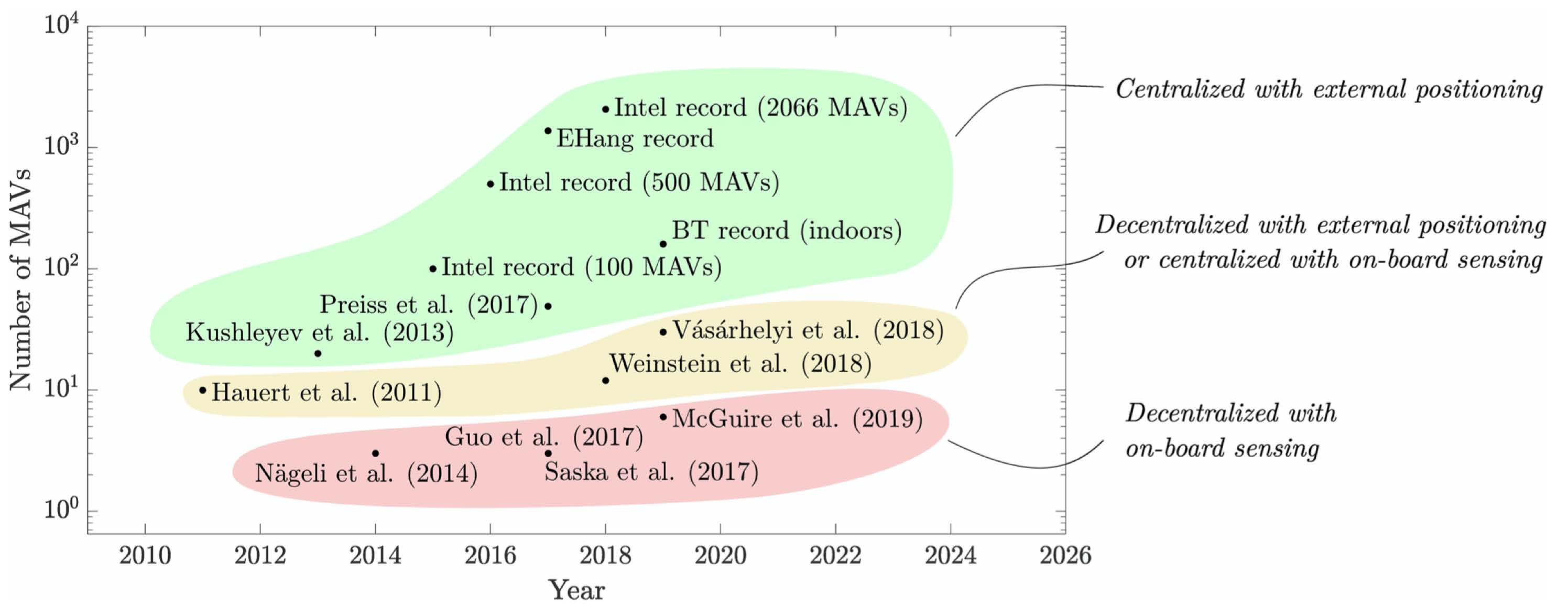
The combination of centralized planning/control with external positioning has allowed to fly significantly larger swarms. The numbers are lower for the works featuring decentralized control with external positioning, or centralized control with local sensing
Three categories
Centralized with external positioning
latest: September 20 2020
3,051 drones
News: https://www.guinnessworldrecords.com/news/2020/10/3051-drones-create-spectacular-record-breaking-light-show-in-china (Company: https://www.dmduav.com/)
YouTube: https://youtu.be/44KvHwRHb3A
Decentralized with external positioning or centralized with on-board sensing
Vasarhelyi et al. (2019)
Decentralized with on-board sensing
Saska et al. (2017)
Visual information in flocking
Soria2019IRC-influence of limited visual sensing using Reynolds
Soria et al., The influence of limited visual sensing on the Reynolds flocking algorithm, 2019
generate flocks with different fields of view
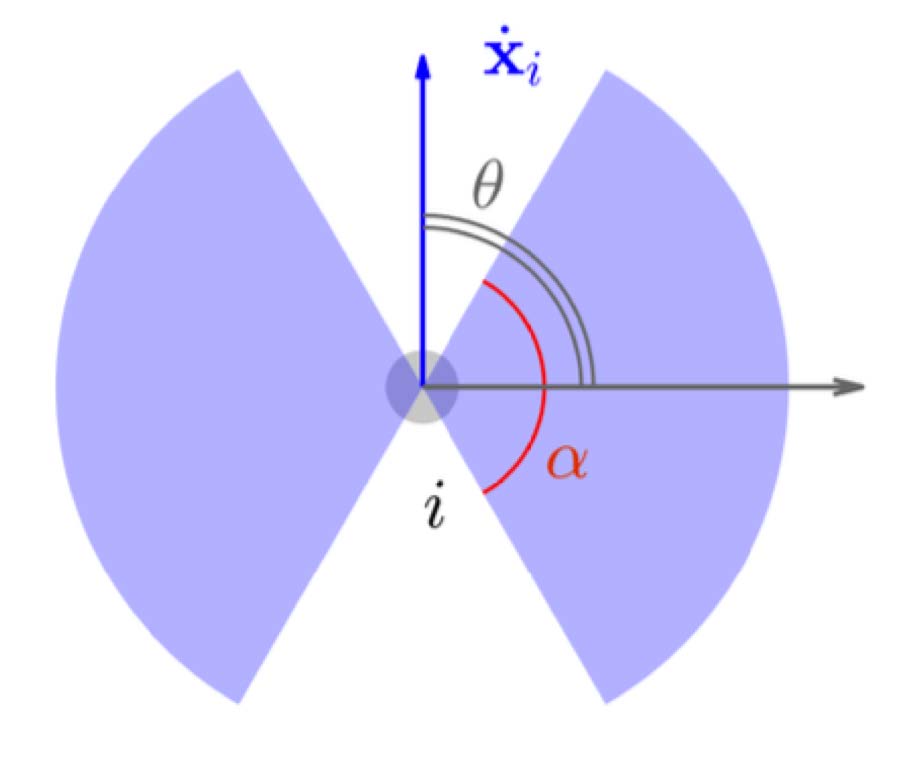
- azimuth/方位角
- width
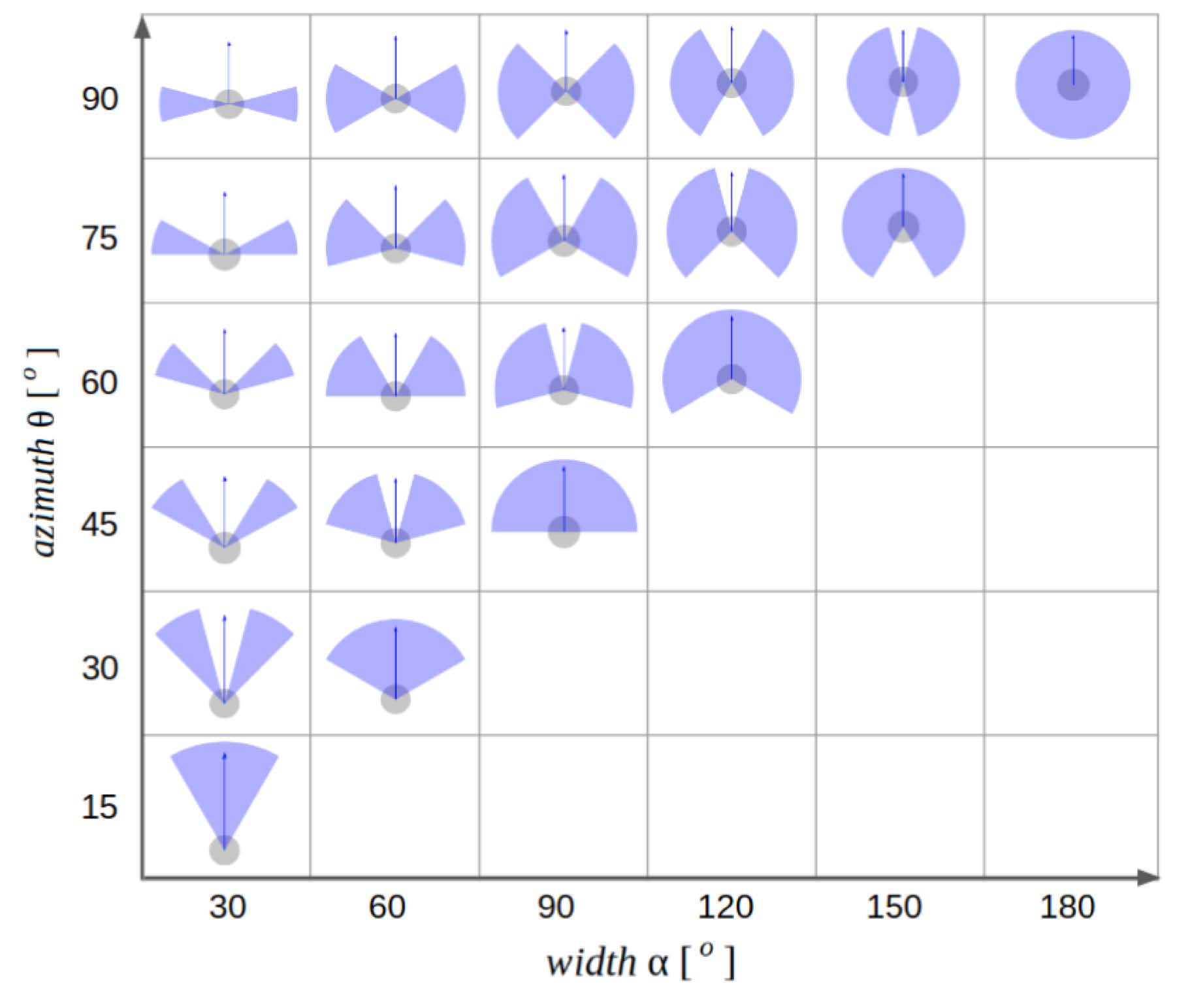
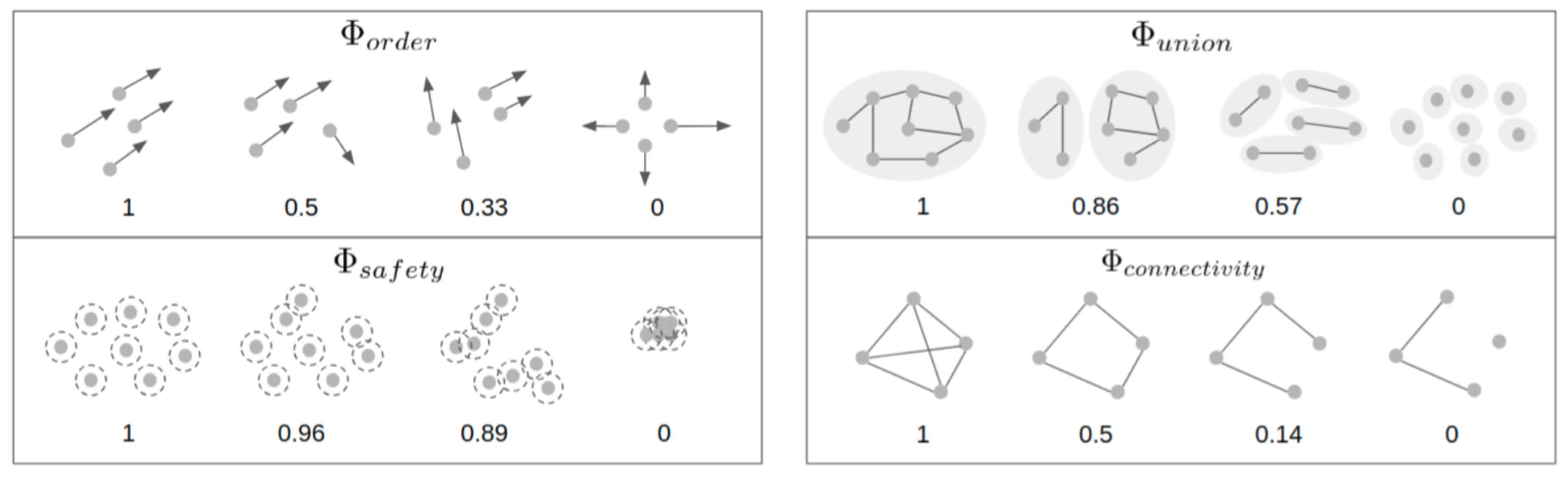
measure flocking performance (all individuals in the flock have the same visual configuration)
- Order: measure of alignment
- Safety: ability to avoid collisions
- Union: ability to stay informed on neighbors
- Connectivity: ability to broadcast messages among drones
results
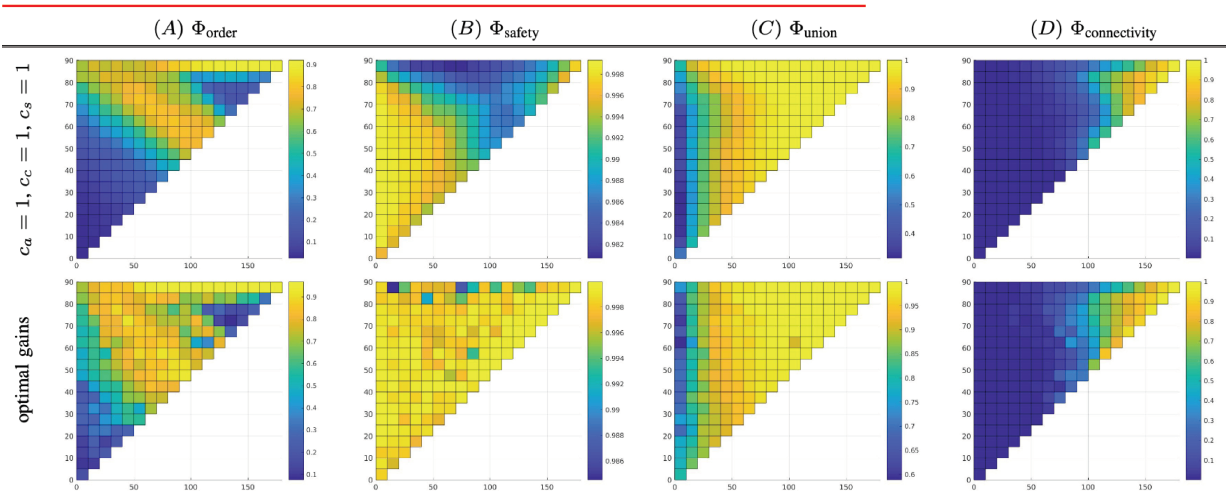
- focus on order and safety (alignment and collision prevention capability)
- largest azimuth and FoV has best performance
- increase in either azimuth or FoV only will degrade the performance
- safety can be achieved even with lower FoV
Schilling2019RAL-Learning to flock in simulation with vision
Schilling et al., Learning Vision-Based Flight in Drone Swarms by Imitation, RAL2019
- use 6 cameras in each side
- training on a dataset to generate the velocity vector for the drone
Stages
- Dataset generation: Flocking algorithm as ground truth
- Training phase: Learn mapping between vision and control output
- Vision-based control: Neural controller for collision-free and cohesive flight
Note
- work well in simulation indoor environment
- it can be robust when individuals has different migration points
- cannot generalize well in background clutter and different lighting condition
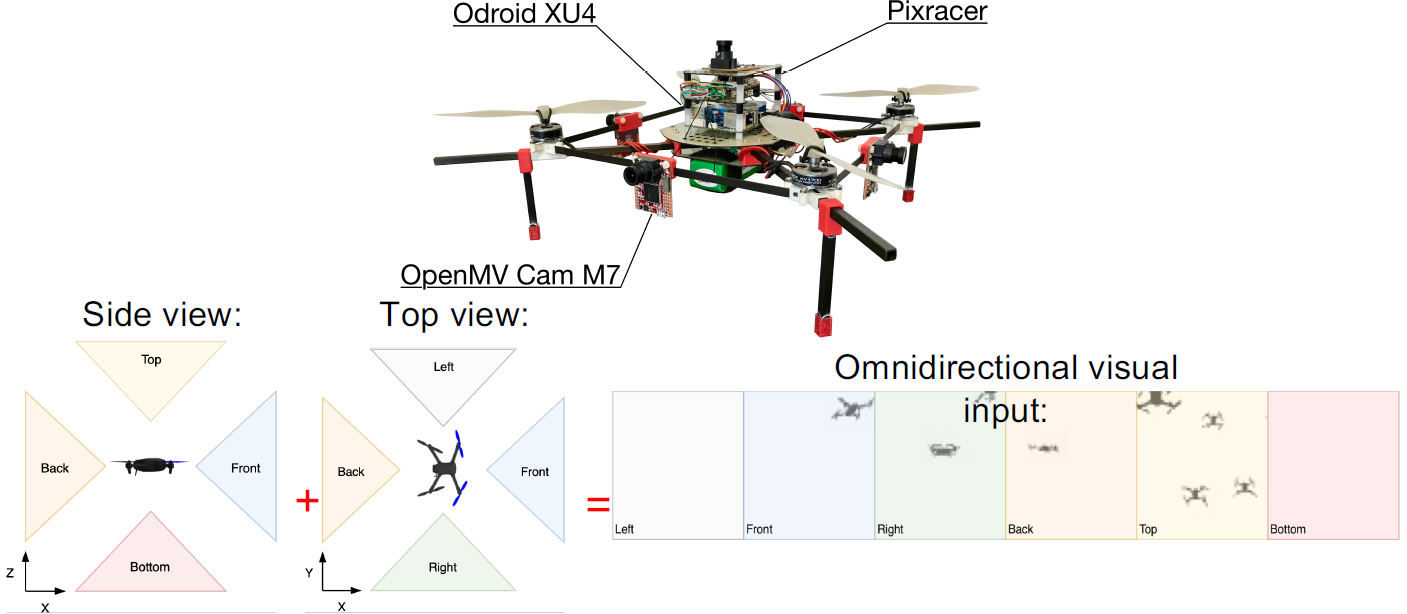
Schilling2021RAL-Learning to flock outdoor with vision
Schilling et al., Vision-Based Drone Flocking in Outdoor Environments, RAL2021
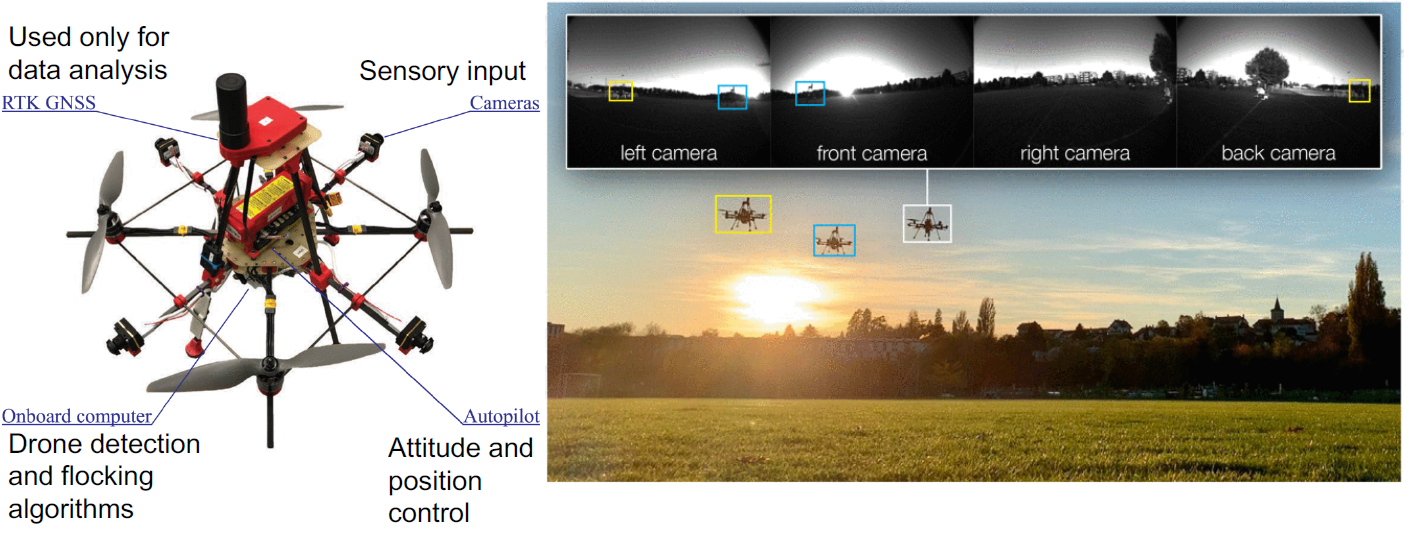
Setup
- Drone with only with 4 cameras in four side
- RTK GNSS is used to compute performance
- train YOLOv3 tiny to recognize other drones using YOLO
Control method
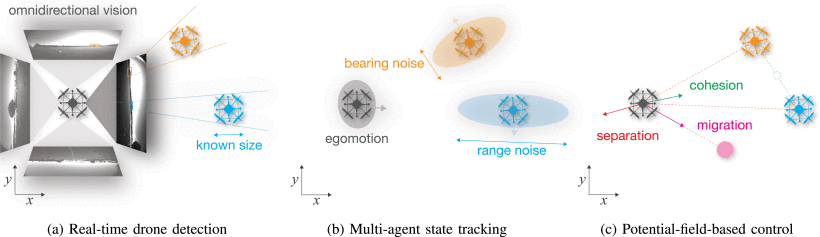
Real-time drone detection
Input: images from 4 cameras
Output: x,y coordinates of perceived drones in image frame coordinates
known size to compute corresponding distance
Multi-agent state tracking
- Input: Locations of drones & noise models
- Output: Range and bearing of all perceived drones with noise
Potential-field-based control
- Input: Range and bearing of all perceived drones
- Output: velocity vector resulting from Reynolds algorithm
☑️ Check points
What information does each agent receive in the Reynolds flocking algorithm?
position and velocity of self and neighbor agents
How are obstacles modeled in Reynold’s flocking
virtual agent; integrate into equations with alignment and separation term (non cohesion)
How is a migration point incorporated in flocking algorithms
add a migration velocity term
What does the Olfati-Saber algorithm ensure?
No collision. The acting force will be zero when reach the preferred distance
What are the three steps of vision-based drone flocking algorithm?
- Real-time drone detection
- Multi-agent state tracking
- Potential-field-based control
images from 4 cameras -> x,y coordinates of perceived drones in images -> Range and bearing of all perceived drones -> velocity vector
Flapping-Wing (week8)
Introduction
lift and thrust generation, and maneuvers mostly obtained by using the wings
imitate the flapping-wing flight of birds, bats, and insects
scale down better then rotary crafts and fixed wing UAVs
Challenges:
- Increased mechanical and control complexity
- Complex modelling due to unsteady aerodynamics
Structure
categories were determined to be the tail (1) and wing design (2)
- requires the use of a tail for stability and/or control purposes
- generate the lift and thrust forces necessary for flight using flapping wings
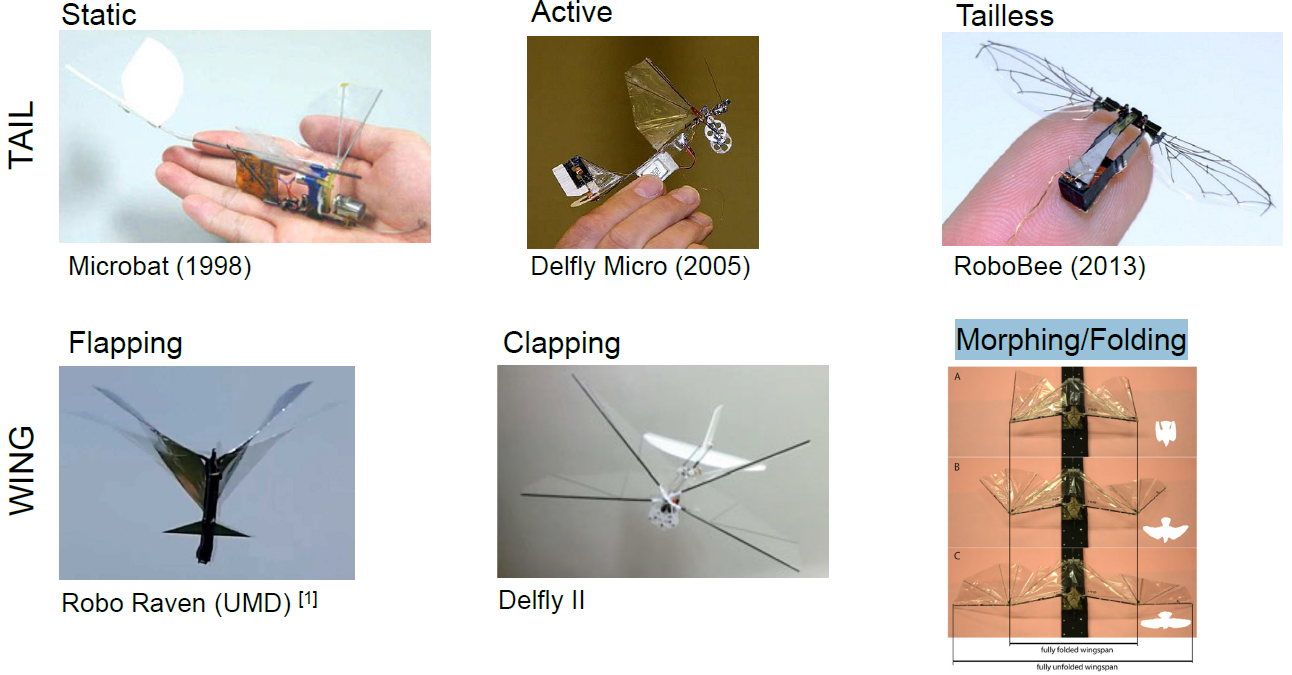
Flight mechanics - Lift generation
Flapping Wings
two wings are flapped to produce both lift and thrust, thus overcoming gravity and drag to provide sustained flight
Clapping
Increase of lift during the “clapping
cancels out the vertical oscillations
Morphing/folding
flap their wings downward, fold them in toward their body
minimum wing area during the upward flap -> minimize undesired negative lift
Lift generation in hovering flight
Asymmetric hovering
Symmetric hovering
produced during the entire wing stroke exploiting different unsteady mechanisms.
- Leading edge vortex
- Rotational forces
- Clap-and-flight motion
Lift generation in forward flight
Downstroke/Upstroke
Flight mechanics - Maneuvering
flapping wing MAVs can use the tail and / or the wings for control.
ail actuation
- Aircraft tail
- Aircraft tail with propeller for yaw and elevator for pitch
- Inverted V-tail
Wing actuation
- Changing the angle of incidence
- Tensioning the wing (拉紧机翼)
Energetics
☑️ Checkpoints
What are the main types of tail designs found in flapping wing MAVs?
- Static
- Active
- Tailless
What are the main types of wings designs found in flapping wing MAVs?
- Flapping
- Clapping
- Morphing/Folding
What are the main mechanisms for lift generation in symmetric hovering flight?
- Leading edge vortex
- Rotational forces
- Clap-and-flight motion
What are the main steering strategies in flapping flight MAVs?
Tail actuation
- Aircraft tail
- Aircraft tail with propeller for yaw and elevator for pitch
- Inverted V-tail
Wing actuation
- Changing the angle of incidence
- Tensioning the wing (拉紧机翼)
- Controlling the stroke (拍打角度)
Drone Regulations (week8)
Author: Markus Farner
https://www.bazl.admin.ch/bazl/en/home/good-to-know/drohnen.html
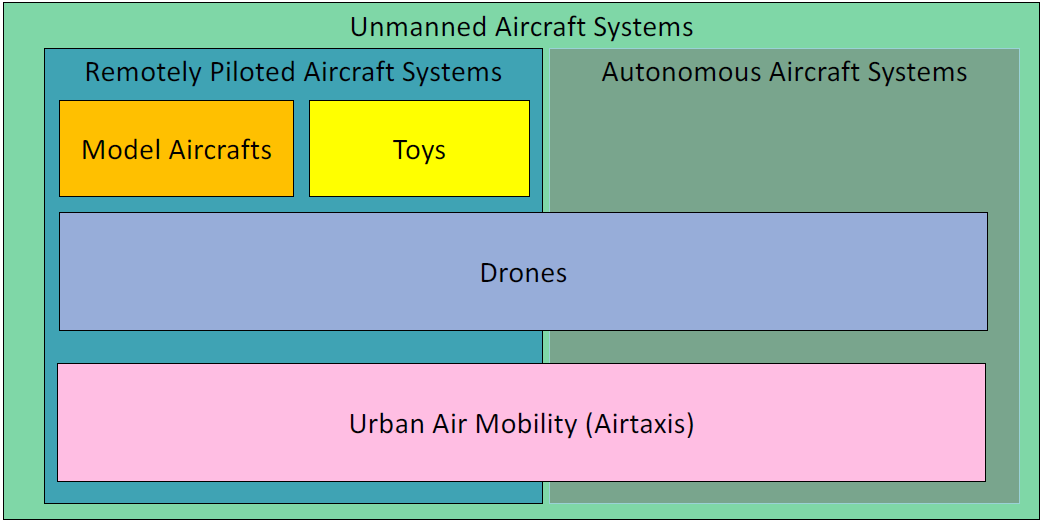
- Unmanned Aircraft Systems (UAS) >= Drones; UAS = Remotely piolted aircraft systems / autonomous aircraft systems
Rules in Aviation: Federal Office of Civil Aviation Switzerland
Everything which is not forbidden is allowed -> Switzerland
Trust, less difficult for innovation
3 Pillar Concept / Drone Categories
- Open-Within the legal framework (No Authorization required)
- Specific-Not sufficiently safe (Authorization required)
- Certified-Approved to accepted standards
Act
Ordinance on Special Category Aircraft
- No authorization required for commercial flights
- No distinction between Unmanned Aircraft and Model Aircraft
DETEC Ordinance on Special Category Aircraft
- No authorization below 30kg
- Within direct visual contact (VLOS)
- Not within a distance <=100m around crowds
ANSP (Skyguide) or Airport responsibility
- > 5km Distance to civil & military airports/aerodromes
- < 150m AGL (Above Ground Level) within a CTR
Act in EU
Open/Specific/Certified
Difference
- restrictions: MTOM 25kg
- maximum flying altitude: 120m
Specific Category
Application for an operating permit on the basis of the SORA (Specific Operations Risk Assessment)
Operational Volume = Flight Geography + Contingency Volume
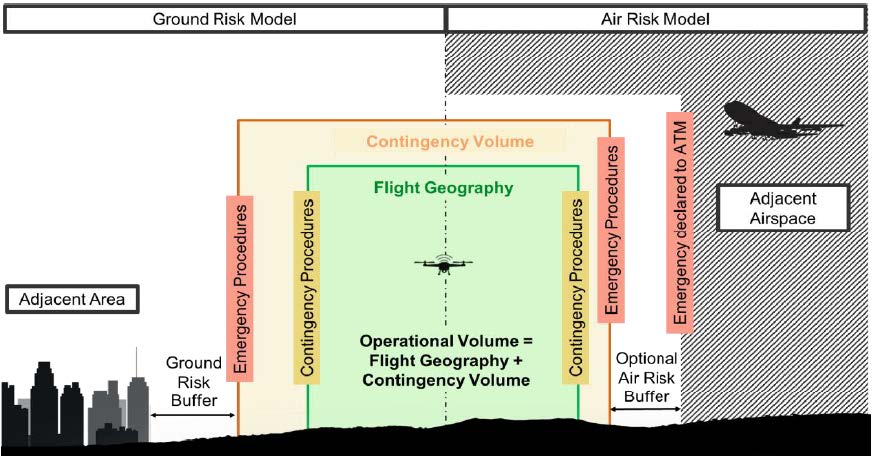
- ❓ Robustness Levels: Integrity + Assurance
U-Space
The U-space is a collection of decentralized services that collectively aim to safely and efficiently integrate drones into the airspace and enable drone operations alongside manned flight.
https://www.bazl.admin.ch/bazl/en/home/good-to-know/drohnen/wichtigsten-regeln/uspace.html.html
https://www.skyguide.ch/en/events-media-board/u-space-live-demonstration/
airspace in block to avoid collision and report the location for further path calculation
- U-space is capable of ensuring the smooth operation of all categories of drones, all types of missions and all drone users in all operating environment
☑️ Checkpoints
Federal Office of Civil Aviation FOCA
What defines the three drone categories?
Open-within the legal framework (No Authorization required)
low risk; maximum flying altitude: 120m
Specific-Not sufficiently safe (Authorization required)
enhanced risk
Certified-Approved to accepted standards
risk comparable to manned aviation
What is the SORA declaration?
- stands for Specific Operations Risk Assessment
- used for Specific Drone Categories
- assigning to a UAS-operation two classes of risk, i.e., ground risk model and air risk model
the multi-stage process of risk assessment aiming at risk analysis of certain unmanned aircraft operations, as well as defining necessary mitigations and robustness levels
Is FOCA authorization sufficient for operating drones in the “Specific” category?
No. FOCA authorization is required for the "Specific" category, but it is not sufficient because other federal, cantonal, and communal authorities may require additional authorizations
What is U-space?
🚧 U-Space provides a framework to facilitate the implementation of all types of operation in all classes of airspace and all types of environment, while ensuring an orderly coexistence with manned aviation and air traffic control.
from U-Space: The airspace of the future
UAS Hardware (week9)
Introduction
main component required
The aerial vehicle
Air frame
Actuators for propulsion and control
Energy source
Autopilot
- Sensors for attitude estimation
- Electronics for regulation, control and communication
- Sensor and avoid system
Payload
- Cameras
- Environmental sensors (wind, temperature, humidity)
- Robotic arms for manipulation
Ground Control Station
- Communication systems
- Interface to monitor internal parameters and to send commands to the vehicle
Frame and materials
materials comparison
| Material | Composite | ABS/PLA | Wood | Foam |
|---|---|---|---|---|
| Pros | Stiff, lightweight | Easy to manufacture by 3D printing or injection molding | Lightweight and cheap | Lightweight and soft, resistance to collision |
| Cons | Expensive, complex to manufacture | Heavier, less stiff | complex to work with | limited load |
| Comment | - | useful for prototyping | - | absorb energy, less prone to damage |
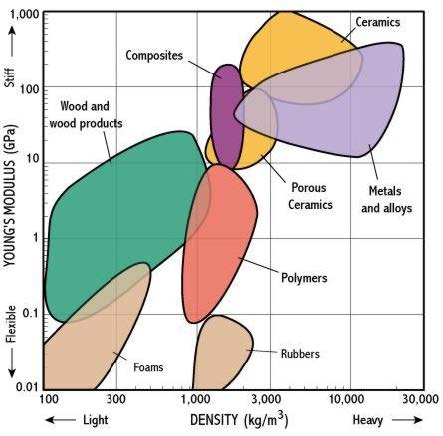
metric when considering materials
Young's modulus [wiki]
弹性模量,正向应力与正向应变的比值
- measure of stiffness
- defines the relationship between stress and strain
- Foam < ABS/PLA/Wood < Carbon fiber

Specific modulus [wiki]
比模量,单位密度的弹性模量,劲度-质量比,在航天工业中有广泛应用。
- elastic modulus per mass density of a material
- stiffness to weight ratio
- High specific modulus materials find wide application in UAVs where minimum structural weight is required.
Energy sources
Goal: power the robots to fly
Metric: energy density, power density, charging time and so on
Category
Nickel-Cadmium (NiCd) | 镍镉
- Mature and cheap
- Low energy and power density -> short flight time
Nickel-Metal Hydrate (NiMh) | 镍氢电池
由镍镉电池(NiCd battery)改良而来的,其以能吸收氢的金属代替镉(Cd)。它以相同的价格提供比镍镉电池更高的电容量、较不明显的记忆效应、以及较低的环境污染(不含有毒的镉)
[wiki-zh]
- Higher energy density than NiCd
Lithium-Polymer (Li-Po) | 锂离子聚合物电池
- rapidly growing market and performance
- Higher energy and power density compared to NiCd
- Regular geometry for easy integration, e.g., cuboid or cuboid
Fuel
- Highest energy and power density
- complex and higher weight-requires tank, distribution system and maintenance
Fuel cell
- Electrochemical reaction of hydrogen fuel with oxygen
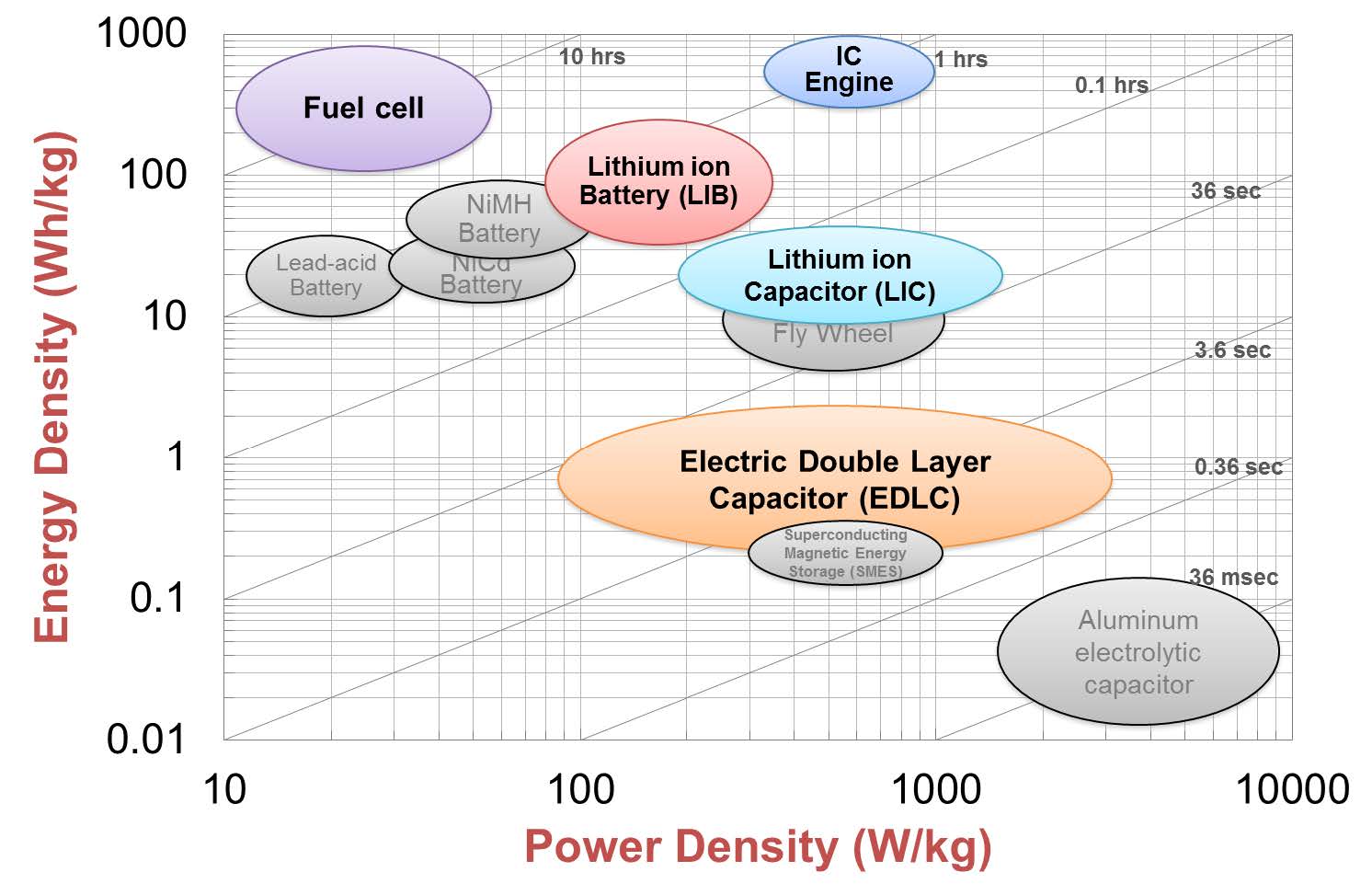
Energy and power density
energy density
amount of energy stored per unit volume or mass
power density
how fast or quickly to discharge into mechanics
amount of power (time rate of energy) per unit volume or mass
Conclusion
- Fuel has highest energy and power density
- Fuel cell has highest energy but lower power density
- LiB has higher energy and power density than NiMH and NiCd
Li-Po batteries
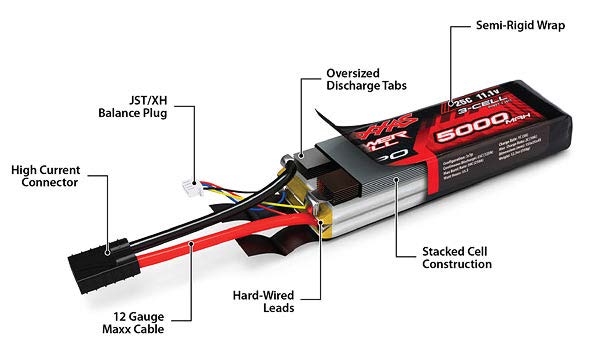
most commonly-used UAV energy source
Each battery composed of one or more cells connected in series
S=series, P=Parallel
Each cell has
nominal voltage of 3.7 V
a maximum voltage of 4.2 V
a capacity (mAh)
e.g., 1000 mAh
a specific discharge and charge rate (C)
e.g., Discharge rate with 25-50C = 25-50 A of max continuous discharge current; Charge rate 2C = 2 A
Discharge Curves of Li-Po battery
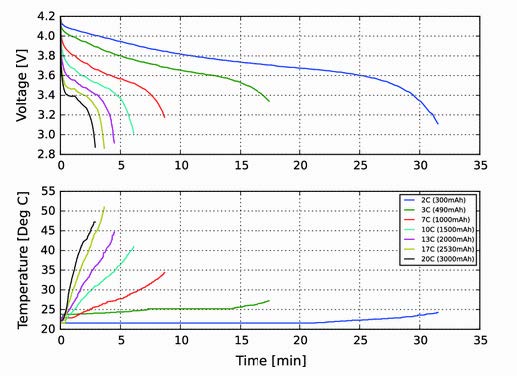
- not linear of time
- the discharge curve is determined by the amount of current (expressed in “C”) drawn from the battery.
- higher discharge rates -> faster rising temperature -> poses overheating risks.
Book: G. C. H. E. Decroon, M. Perçin, B. D. W. Remes, R. Ruijsink, and C. De Wagter, The delfly: Design, aerodynamics, and artificial intelligence of a flapping wing robot. 2015.
Energy Curve of Li-Po battery
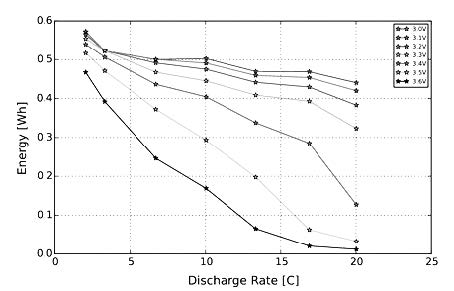
How much energy the same LiPo battery can provide until its voltage drops below a certain voltage
10 times higher battery load (discharge rate) -> 17 times shorter flight time
nonlinear relationship
Actuators
Actuators for propulsion
| Electric motors | Combustion engine | Hybrid | |
|---|---|---|---|
| Pros | clean and quite; Reliable and easy to maintain; Fast to change operational state (accelerate and decelerate) | High weight to power ratio using fuel | Long endurance; Suited for fast change of speed |
| Cons | Limited weight to power ratio due to battery | Vibration, dirt, and noise; Requires tuning; Not suited for fast change of speed | Complex and expensive |
Combustion engine is not suited for fast change of speed (problem in controlling quadcopters)
Hybrid systems (fuel generator coupled with electric motor)
e.g. skyfront drone with 4.5 hour endurance (demonstrated) and 3 kg payload capacity
Electric motor example-Brushless DC electric motors
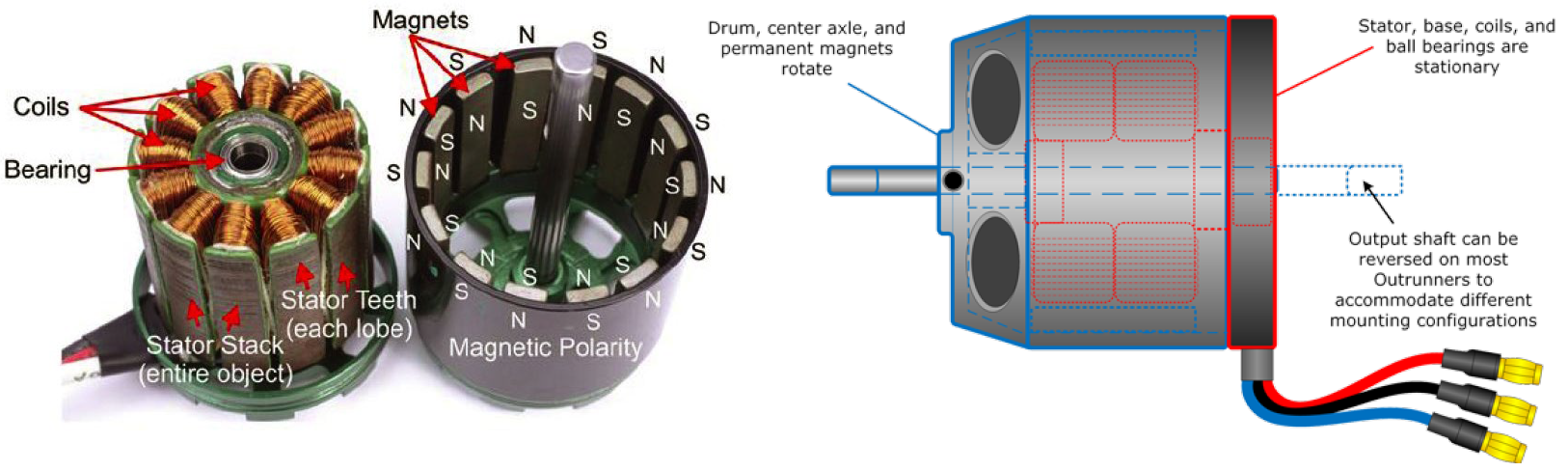
Brushless: no electrical physical connection
Pros
- High efficiency and high torque/power density
- High speed range
- Large range of thrust (from to N)
Cons
- manufacturing complexity -> expensive
- Control is complex and expensive requiring and electronic speed controller (ESC, 电控)
Main motor data
3 primary data:
Size
Nominal voltage (number of battery cells, e.g., 3S)
Speed constant KV (No load rpm/Volt)
- High KV -> high speed and low torque
- Low KV -> low speed and high torque
Actuators for control/maneuvering
Servomotors
need to deflect the control surfaces
- rotary or linear actuators
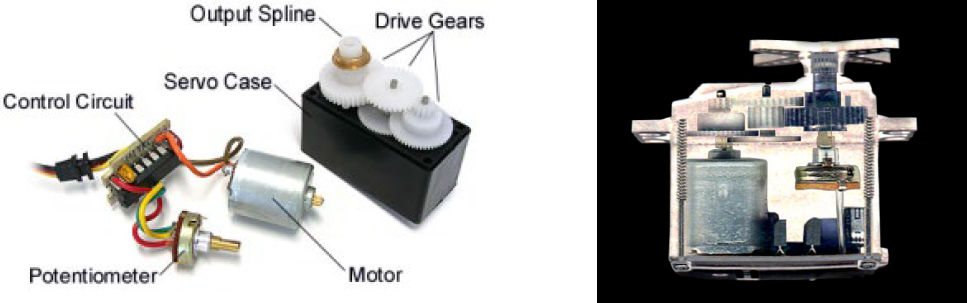
3 wires (B-Ground, R-Voltage, Y-Signal) - send power and signal to control circuit
brush motor in small scale and connected to gear drive (set correct speed and torque, connect to potentiometer)
potentiometer (电位器) sensor for angular position control
Examples of Servomotors
| Rotary servos with push rod | Linear servos |
|---|---|
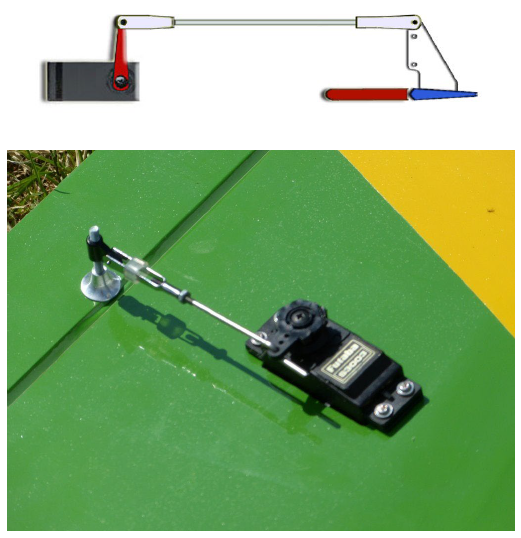 | 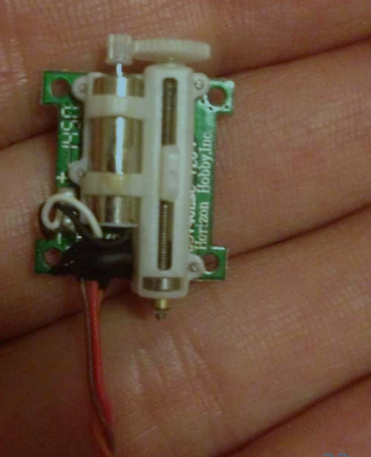 |
| Weight: 1 to 500 g | Weight: 1 to 5 g |
| - | to control elevators, flaps and ailerons |
Propellers
to convert power (delivered by a rotating shaft) into thrust
Characteristics
Diameter
- the length of prop from tip to tip
- larger diameter are more efficient
Pitch
- measure how far will fly up
- higher at the root (center) and lower at the tip
Number of blades
- majority of propellers used in UAVs have two blades because of efficiency
- 3 or 4 blades are more compact for a given thrust
Pitch and efficiency at different cruise speed
the blade pitch could be varied in flight
propeller advance ratio VS Propeller efficiency
, flight speed , angular speed , and Diameter D -> tip speed
choose the suitable propeller according to the diameter and pitch to achieve better efficiency curve
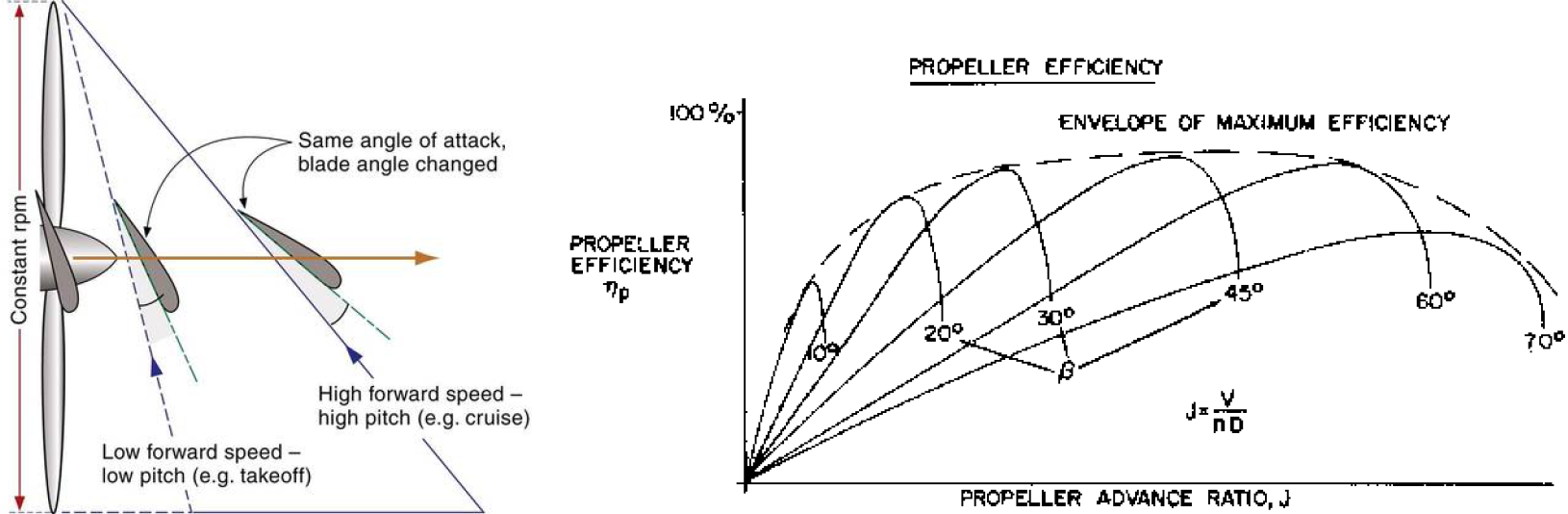
Variable pitch propeller with servo -> achieve best efficiency all the time

Choose the right combination actuator and propeller
match the propeller and the motor to maximize propulsive efficiency
- modelling (http://web.mit.edu/drela/Public/web/qprop/motorprop.pdf)
- calculation software (http://ecalc.ch/)
- testing
Sensors
Proprioceptive sensors: measure the internal state of the UAV, mainly for control
- IMU: accelerometer, gyroscope and magnetometer
- Pressure / altitude sensors
- GPS
- Velocity (Airspeed sensors)
- Power sensor
Exteroceptive sensors: provide information about the UAS environment and are usually carried as a payload
- Camera and sonar for obstacle detection and avoidance
- Environmental sensors
- Camera for video streaming, thermal or hyperspectral imaging
Gyroscopes
measure changes in vehicle orientation
Type: Mechanical; Optical; Micro-electromechanical systems (MEMS)
Categories
- Orientation -> directly measure angles (very rare in robotics!)
- Rate gyros -> measure rotation velocity, which can be integrated
Cons
all gyroscopes are prone to drift unless the error is corrected through reference to some alternate measurement
(not relative to absolute reference but past state)
the drift will eventually exceed the required accuracy
MEMS rate gyros

vibrating mechanical elements to sense Coriolis acceleration (振动机械元件以感应科里奥利加速度)
induce an vibration outside the plane and measure the out-of-plane motion
Pros -> replacing mechanical and optical gyros
- have no rotating parts
- have low-power consumption requirements
- small
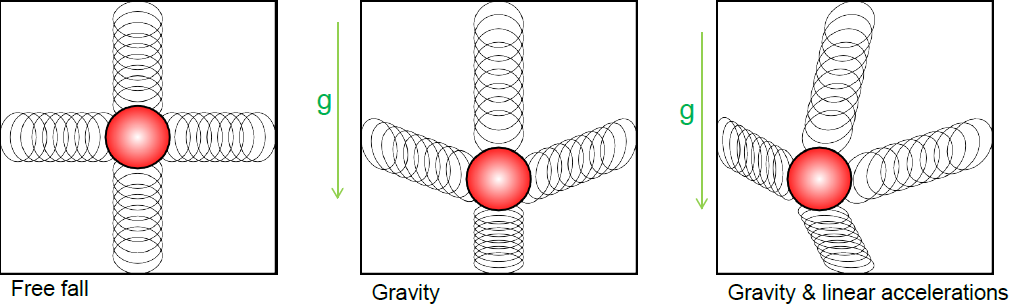
Accelerometers
measure acceleration to get the inertial information
- behaves as a damped mass on a spring
- MEMS use cantilever beams (悬臂梁) and a proof mass.
- The way of measuring the beam deflection is often capacitive or piezoresistive (电容性或压阻性的)
- have three axes => inclinometers (inclinometers)
Magnetometers
Exteroceptive
electronically compass 电子罗盘
direct measure of the magnetic field
Hall-effect (霍尔效应)
Flux Gate (磁通罗盘) [wiki]
two perpendicular circuits to get the force
Pros
weakness of the Earth magnetic field
easily disturbed by magnetic objects or other sources
not working in indoor environments
because of wires or other electronic device
Pressure / Altitude sensors
to measure the altitude according the atmosphere pressure
measure the changing distance of the deforming membranes: piezoresistive (压阻式), capacitive, optical, electromagnetic, etc
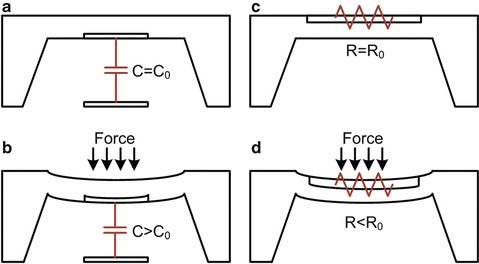
has a vacuum inside the housing to get an absolute pressure
Airspeed sensors
measured using a pitot tube (皮托管)
directed into the direction of motion
the difference between the stagnation pressure (static + dynamic pressure) -> the airspeed
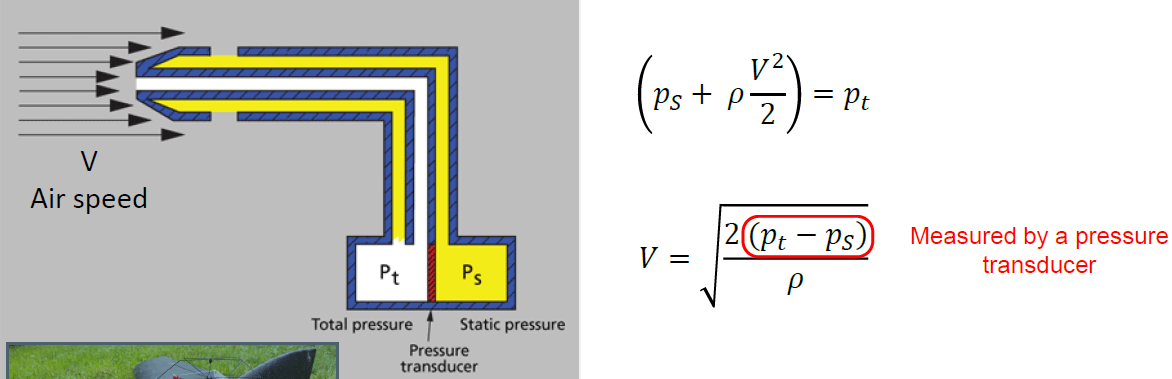
measures the speed of a UAV with respect to the air (airspeed) -> used for fixed-wing UAV
not the absolute speed of the UAV

Global positioning system (GPS)
Global Navigation Satellite System (GNSS): This term includes
- e.g. the GPS, GLONASS, Galileo, Beidou and other regional systems.
- Pros: multiple satellites is accuracy, redundancy and availability at all times.
Relatively lower accuracy: have a position accuracy within 20 m in the horizontal plane and 45 m in the vertical plane
enhancement techniques
WAAS or other ground tower-based services: static
get close to 1-2 m accuracy
Real time Kinematic (RTK) positioning: Base Station receiver and a receiver on the vehicle
close to 1 cm accuracy
Power sensors
- measure the battery voltage/current
- -> trigger safety procedures (return to home on low battery.)
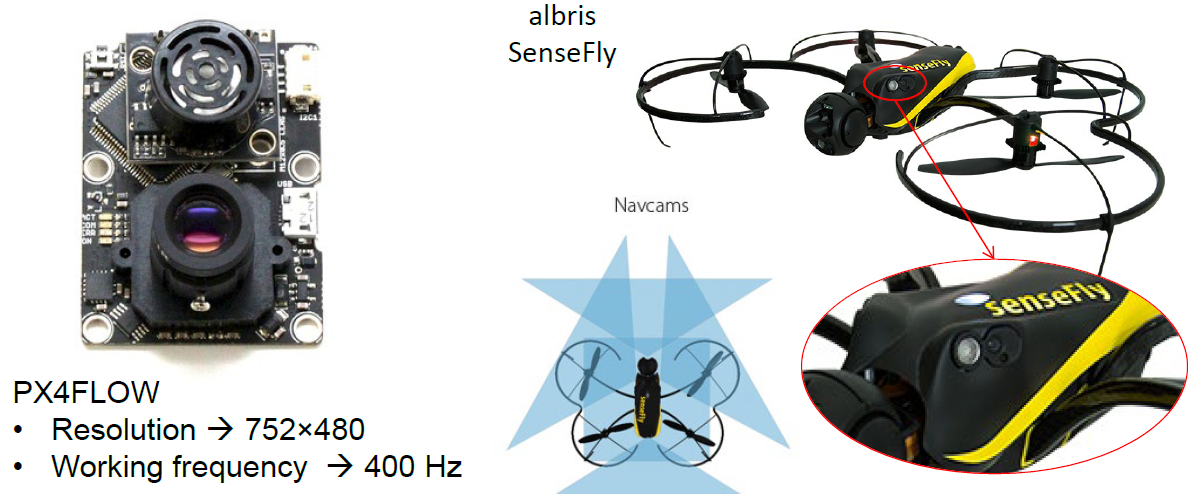
Optic flow cameras
- used to improve state estimation for accurate positioning and height estimation also in GPS denied environments
- measure the movements along x, y and z direction by tracking the features
- used for obstacle avoidance, position holding, and precise landing
Autopilots
system used to stabilize (e.g. attitude stabilization of a multicopter) or to control the trajectory
- Microcontroller
- Attitude sensors
- I/O interfaces
receive the input information -> process information -> send actuator commands
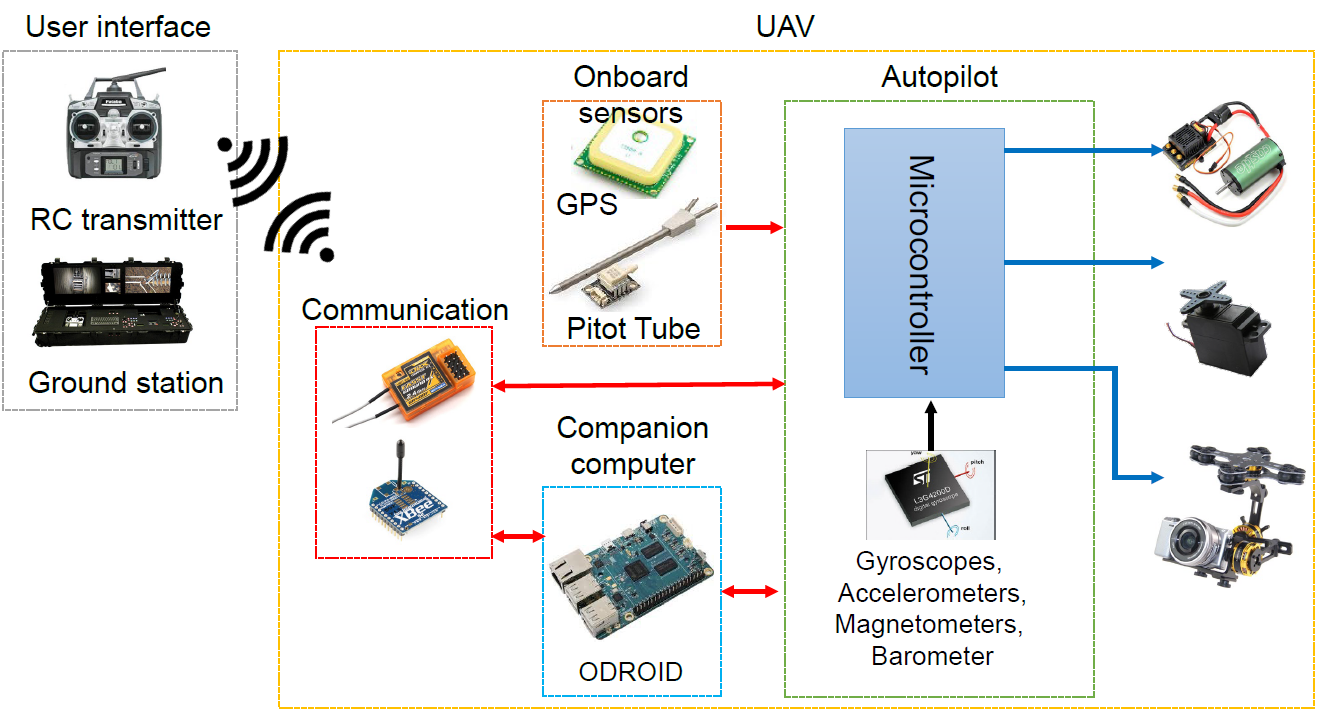
- A companion computer is used to perform high level computation tasks that can’t be directly performed by the autopilot
Communication protocols
- RC transmitter to communicate between RC and flight controller
- Telemetry to communicate between PC and flight controller
✖️ Checkpoints
- nothing left in this course
Insect-inspired vision (week10)
- Inserts rely on vision for several flight behaviors
- attitude stabilization; collision avoidance; altitude regulation ..
Optical flow
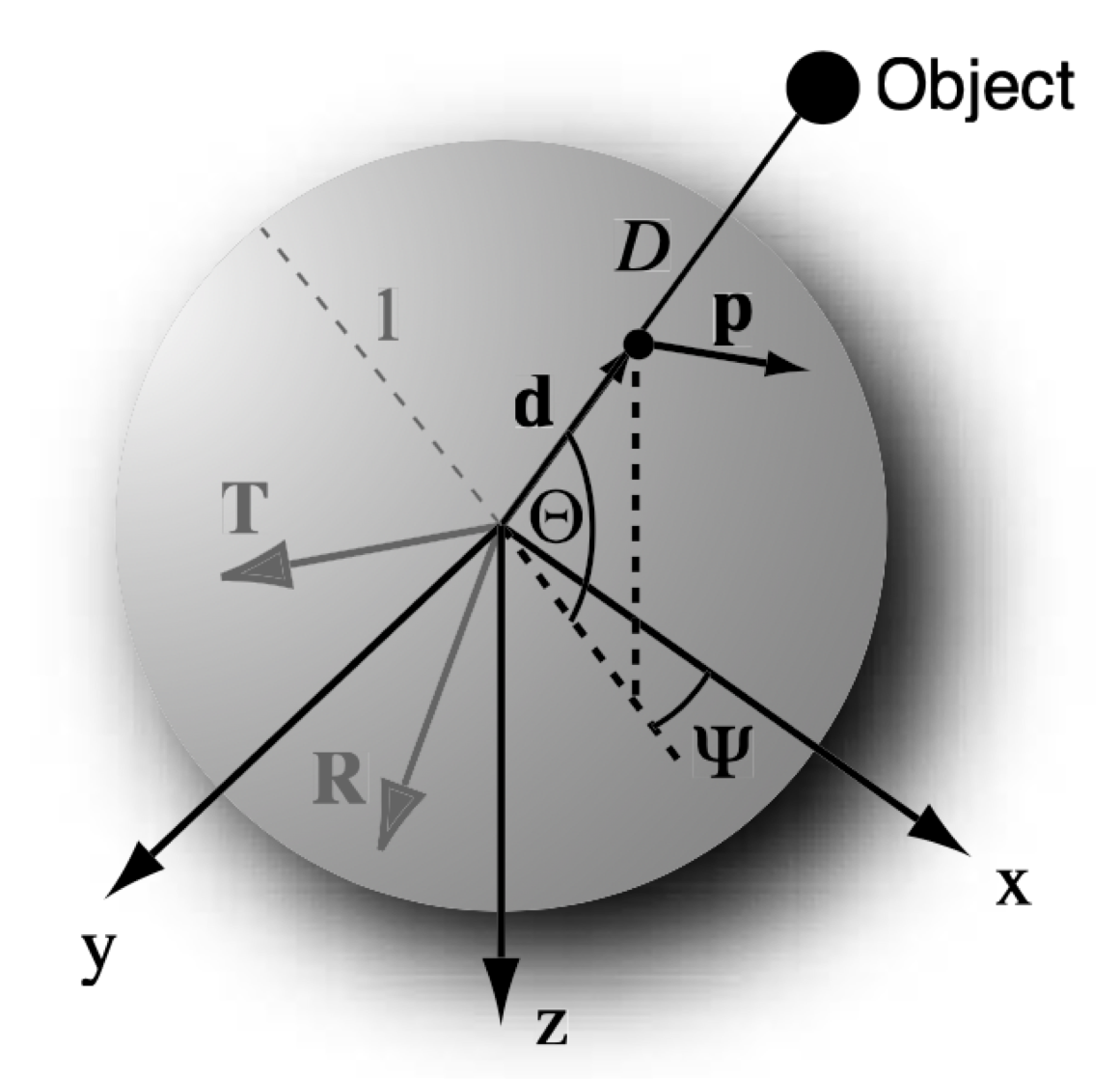
- azimuth方位角; elevation 升角
- T/R Translation/Rotation vector
- d/D viewing direction/distance to object
- p result optical flow (tangential to viewing direction)
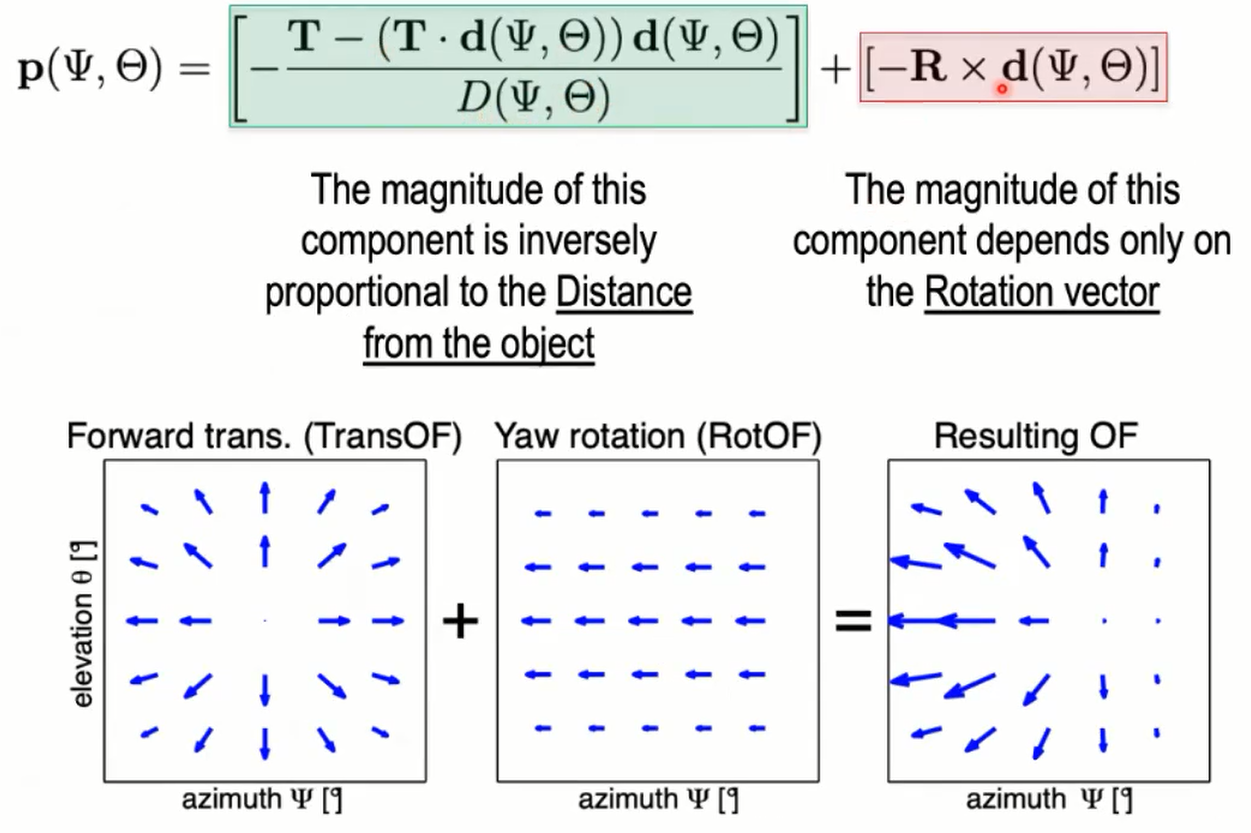
- translation + rotation component of the optical flow
For pure translational motion
, where
motion parallax, OF is
- directly proportional to the forward speed T
- Inversely proportional to Distance D
Experiments1
- landing: the flying speed of bees is decreasing as the height decreases
- crossing speed: the flying speed of bees is decreasing as the corridors narrow (distance)
Experiments2
- both vertical stripes: try to balance the OF magnitude in both sides to fly in the center
- horizontal vs vertical stripe: low optical filter on the horizontal side because of it it in the same direction as bird moves while more OF near the vertical side (fly to H side to balance)
Sensors used for flight control
Compound eyes: a large set of eyes to detect in different directions, no color capability -> used to detect optical flow
- small viewing angle
- several small eyes
Ocelli: a small set of eyes are sensitive to luminosity to detect contrast; on the head and point upward -> used for stabilization, orientation, and attitude
Halteres (like accelerators) -> used to measure rotational speed and stabilize than visual information
Architecture of insect eyes and brains
Optic flow is detected by neurons in the lamina (椎板), whose response is aggregated and transformed by neurons in the medulla (髓质) and in the lobula plata (小叶平台) of brain regions
Elementary Motion Detector 初级运动检测器
Correlation between two adjacent, time-delayed contrast detectors | 两个相邻的延时对比检测器(小眼)之间的相关性
photo receptor -> temporal delay -> correlation -> subtraction
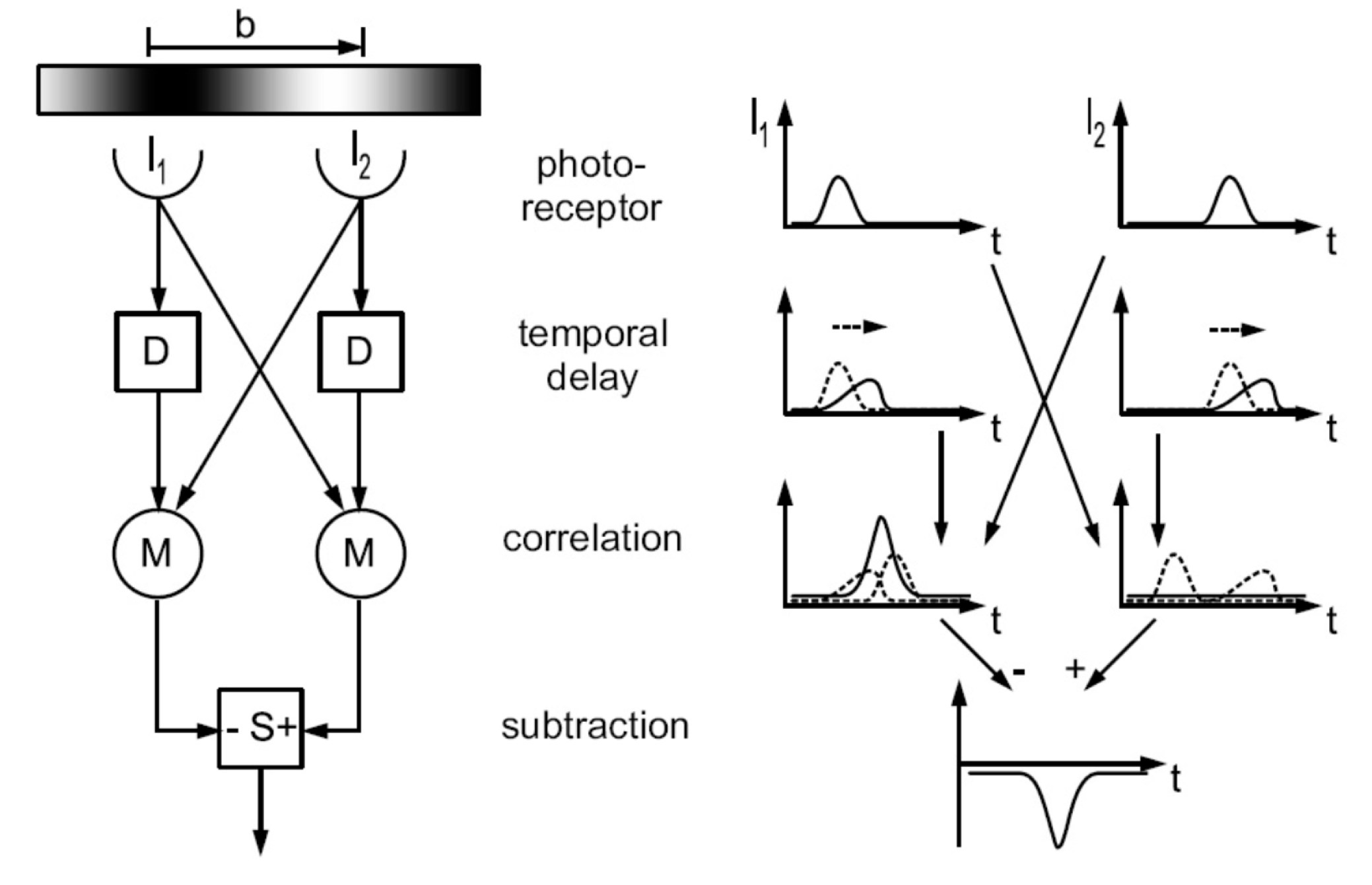
the speed of motion can be detected as the peak the motion
not a reliable velocity estimator -> depends on temporal and spatial frequency -> cannot measure velocity objectively
Experiment - Optomotor Response 视运动反应
torque response is not related to optical flow speed
Wide-field, motion-specific neurons
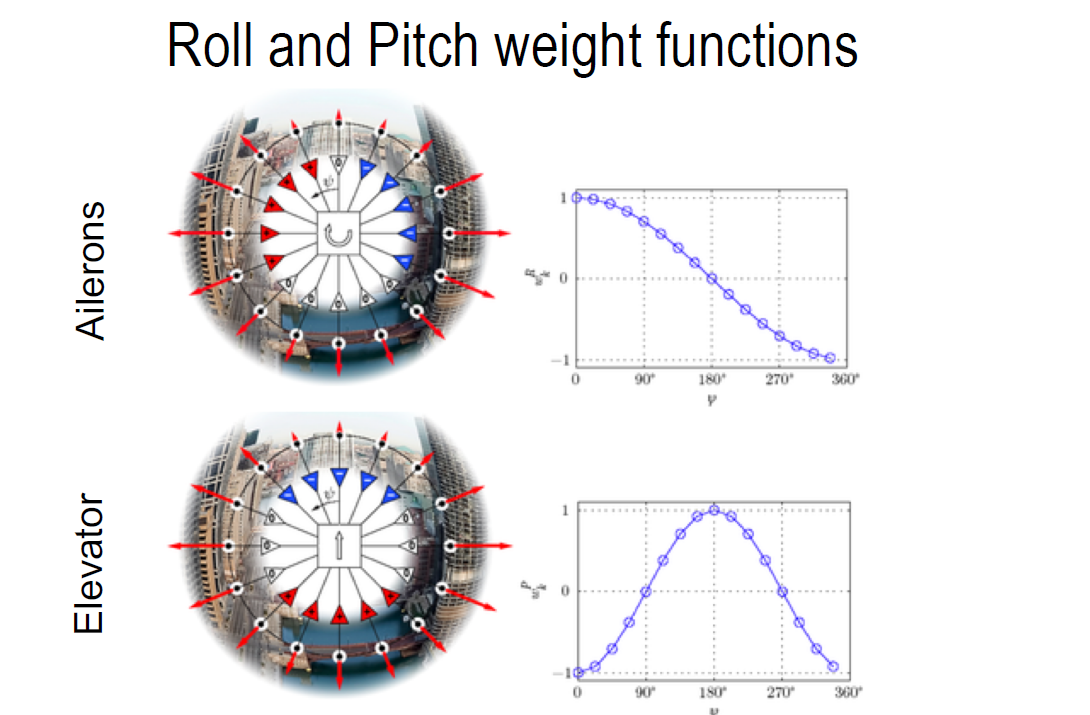
- specialized neurons that integrate EMD signals from different regions and respond only to specific OF patterns. 有些特定的神经元只对特定区域特定方向的光流起作用
Optic Flow Computation
Gradient Descent Methods
assumption: brightness I does not change across the image (n,m) as the agent moves over time t
Handcrafted Example: Lucas-Kanade method
- image smoothing (low-pass filter)
- Compute spatiotemporal derivative
- Integration of derivatives to produce optic flow vector
often iterative and requires significant computing power
Image Interpolation Algorithm –I2A
computed as the image shift that generates the smallest error between artificially shifted versions of the image at time t and the image at time t + Δt
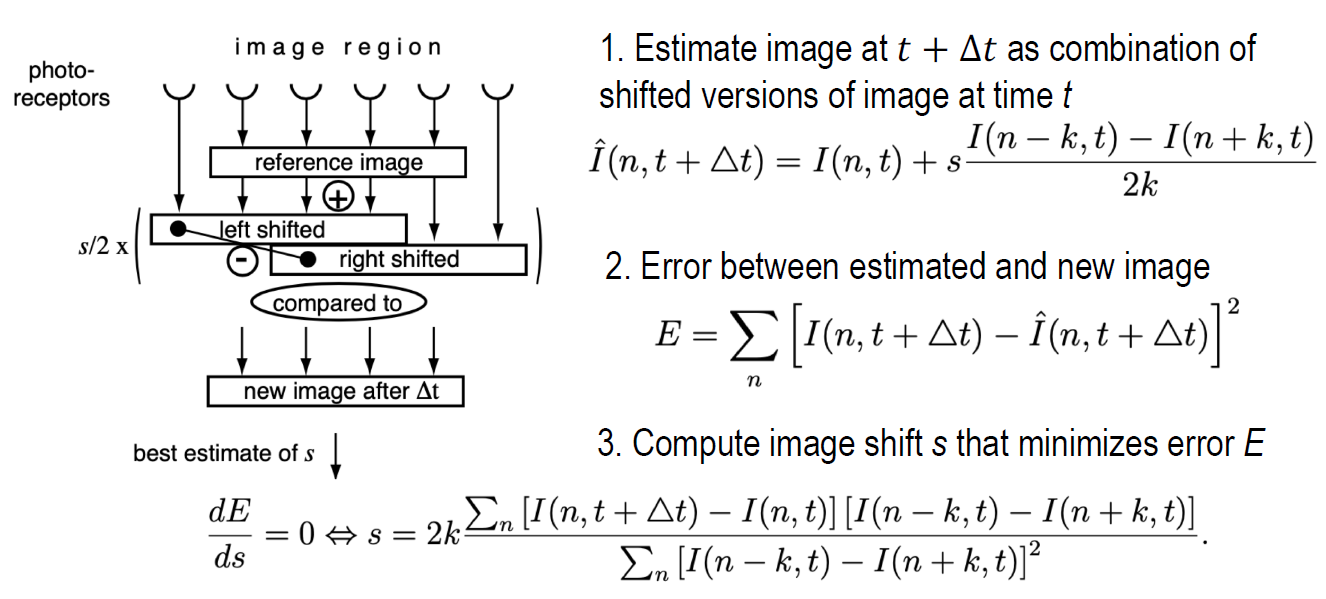
used in Crazyflie drone for optical flow calculation
- moves k pixels in opposite ditections to generate different images
- calculate errors between real images and generated ones
- compute the shift s to minimize error
Obstacle avoidance with I2A
two cameras to look to left and right with DoF of 40 degrees
- OFDiv = OFRight - OFLeft initiate rotation if OFDiv > threshold
- OFDiff = abs[OFRight] - abs[OFLeft] rotate towards OFDiff
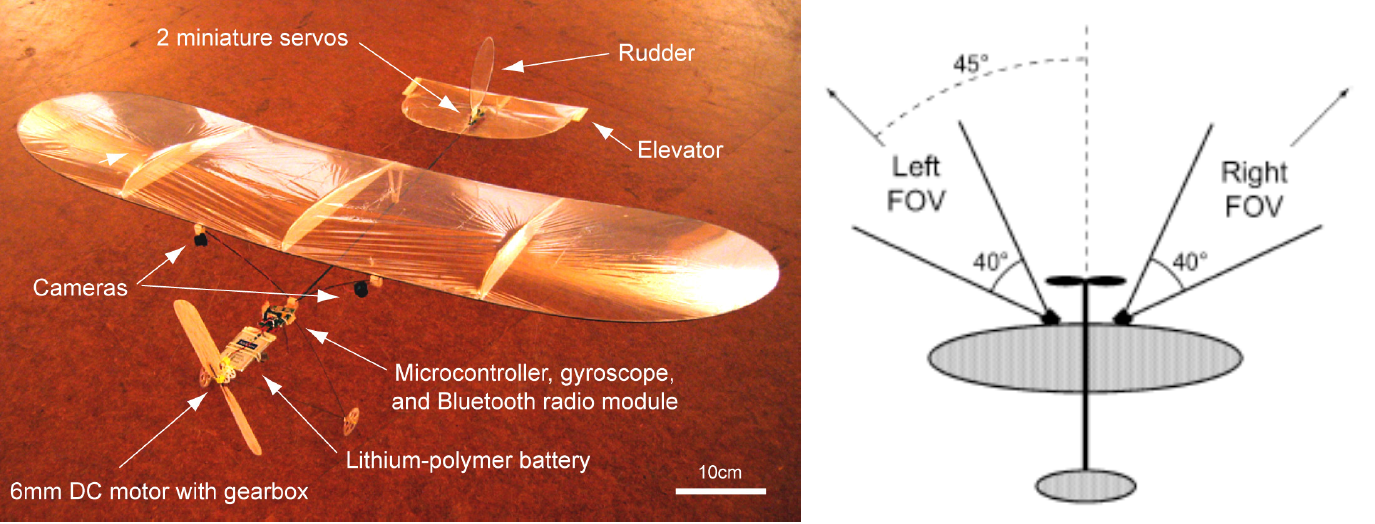
use cameras (optical flow) and gyro with mechanisms (rudder方向舵/elevator升降舵) to control more DoF systems
Zufferey, Klaptocz, Beyeler, Nicoud and Floreano (2007), Advanced Robotics
control pitch and roll of fixed-wing drones by building relation between optical and control planes directly
A. Beyeler, J.-C. Zufferey and D. Floreano (2009) Autonomous Robots, 27(3), 201-219
- Ailerons to control roll
- Elevator to control roll
- use the information from optical flow estimator when the drone closes to the ground
Making an Artificial Compound Eye
Floreano, Pericet-Camara, Viollet et al, PNAS, 2013
☑️ Checkpoints
Influence of agent’s rotation and translation on optic flow and distance estimation
- rotation flow gives no information about distance; only proportional to the angular velocity of the agent
- cannot calculate absolute distance if do not know speed
Influence of angular velocity, spatial frequency, and temporal frequency on EMD (elementry motion decoder)
angular velocity and temporal frequency都是先增后减。
spatial frequency 越大,角速度的图越向后偏移
Functioning of Image Interpolation Algorithm
generate optical flow by computing image shift to minimize the overlap error
use derivation to minimize the overlap error
Methods for discounting rotational optic flow
用IMU估计角速度,然后算rotational optic flow再减去图片得到的即可
remove the rotational optical flow by using IMU to measure yaw angle
Adaptive Morphology in Flying Animals and Drones (week10)
Bioinspired Mechanical Resilience
How do insects cope with collisions?
drones hit to obstacle and fall into the ground will lead to damage
inspired from insects
Sturdy yet flexible exoskeleton | 坚固而灵活的外骨骼
Dual stiffness wing | 双刚度翼
can bend with surface
Mintchev, de Rivaz, Floreano, Insect-Inspired Mechanical Resilience for Multicopters, IEEE Robotics & Automation Letters, 2017
Frames could
- transit from stiff to soft state
- use Energy absorbing material
An active uprighting mechanism for flying robots, Klaptocz et al., IEEE Transactions on Robotics, 2012
- Morphology simplifies control - frame could fly against obstacle
Briod, Kornatowski, Zufferey, Floreano, A collision‐resilient flying robot, Journal of Field Robotics, 2014
flyability
- separate from inner and outer frame while keeping collision prevention indoors
The Size Problem
Self-deployable origami drone
Mintchev, Daler, L’Eplattanier, Saint_Raymond, Floreano, Foldable and self-deployable pocket sized quadrotor, ICRA, 2015
- more durable when collides with obstacle
Origami Drone Wing
Dufour, Owen, Mintchev, Floreano, A drone with insect-inspired folding wings, IROS 2016
Adaptive Morphology
- fixed-wing: only fly upper in the sky cannot stop
- quadrotor: less efficient and short range
Daler, Lecoeur, Hählen, Floreano, A flying robot with adaptive morphology for multi-modal locomotion, IROS Proceedings, 2013
A bioinspired multi-modal flying and walking robot, Bioinspiration & Biomimetics, 2015
can use wing to fly and rotate wing to walk on the ground
Air and Ground Locomotion
Ajanic, Feroshkan, Mintchev, Noca, & Floreano (2020) Science Robotics
Morphing Wings to adapt different winds
LIS hawk inspired from northern goshawk
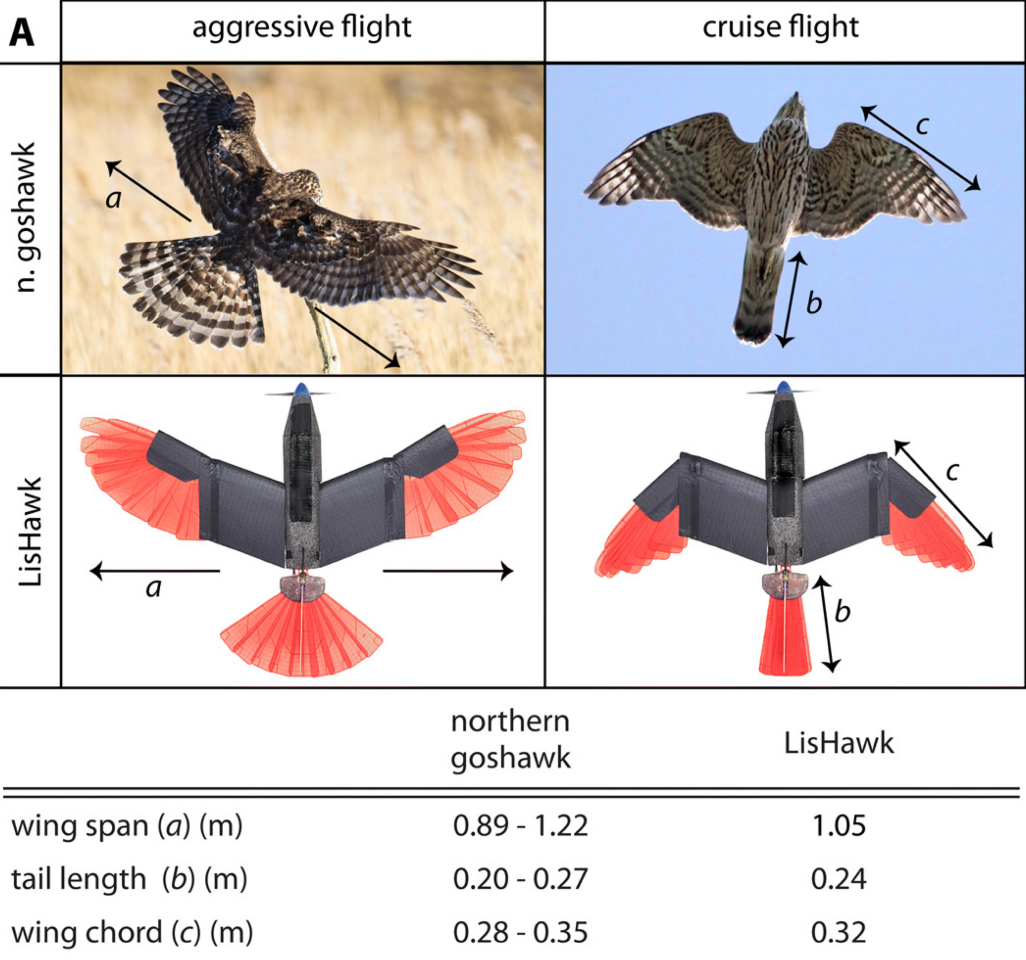
Maneuverability
able to change the velocity vector by changing the wing status
higher linear accelerations on body frame/higher lift/drag coefficient
Agility
able to change angular rate, e.g. pitch and roll angles
Higher angular rates are produced by larger pitch and Agility roll coefficients by extending the wing or not
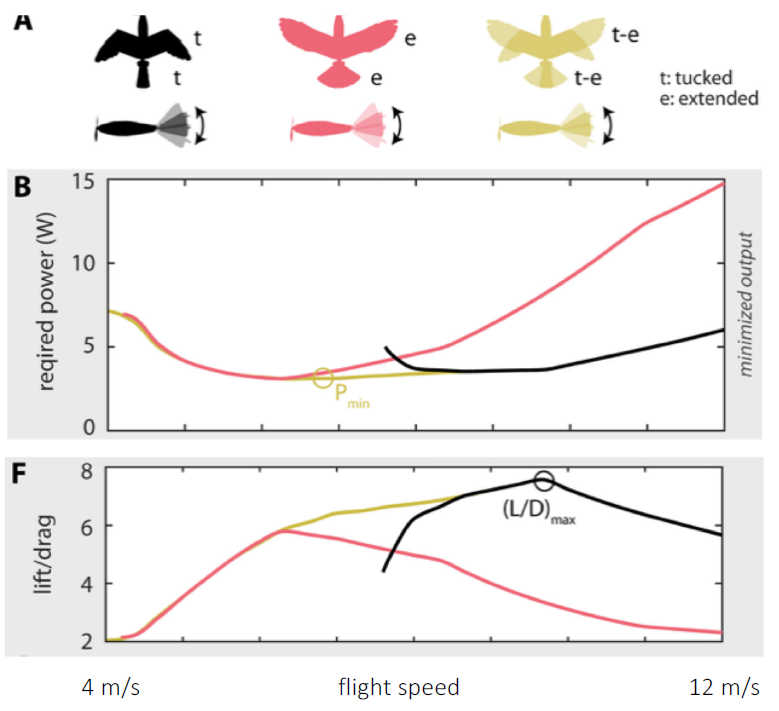
Power requirement and speed range
Extending wing and tail increases lift and allows lower speed range
☑️ Checkpoints
Strategies for collision resilience in flying animals and robots
inserts
- Sturdy yet flexible exoskeleton | 坚固而灵活的外骨骼
- Dual stiffness wing | 双刚度翼
Robots
- dual-stiffness frame and energy-absorbing material
- Use morphology when against obstacle
- Design flexible protective frame
Trade-offs between aerial and ground locomotion that require adaptation
Actuator torque and speed
Fly require high speed and ground locomotion requires high torque. Few motor can satisfy both.
Mass of center
Fly: a bit front , Ground walking: in the center
Inner ratio
约等于wing span,飞的时候展开,地上收起来
Effects of wing and tail span on lift and drag coefficients, and on required power
Extending for aggressive flight while Tucking wing (折翼) for cruise flight
Tucking need base speed to activate
- Tucking -> reduces power requirement at high speeds
- Extending -> increases lift
Agile Flight (week11)
- topics: Perception, Learning, and Control
- Why agile? flying robots to search & rescue
Pfeiffer, Scaramuzza (2021) Human-piloted drone racing: Perception and control, RAL’21. PDF. Dataset.
Humans focus visual attention on future waypoints: receding planning horizon
220 ms perception-control latency → humans can definitely be beat by a machine in a speed race
try to plot literature in different axis (External sensors & agile)
Research challenges & Opportunities
- Autonomous drone racing
- Drone acrobatics
- Low-latency sensing
Autonomous drone racing
P. Foehn et al., AlphaPilot: Autonomous Drone Racing, RSS 2020, Best System Paper Award. PDF YouTube
pass a sequence of gates as soon as possible
- time-optimized trajectory
- execute the trajectory while being robust to disturbances
[1] Foehn, Scaramuzza, CPC: Complementary Progress Constraints for Time-Optimal Quadrotor Trajectories, arXiv preprint, 2020. PDF. Video.
- tight coupling of perception and action necessary?
- plan perception-aware planning and control
Falanga, Foehn, Peng, Scaramuzza, PAMPC: Perception-Aware Model Predictive Cotrol, IROS18. PDF. Video. Open Source: https://github.com/uzh-rpg/rpg_quadrotor_mpc
action objectives + perception objectives => optimization problem
- perception: maximize visibility of POI (minimize the deviation) + minimize the blur (minimize rotation speed)
Kaufmann et al., Beauty and the Beast: Optimal Methods Meet Learning for Drone Racing, ICRA’19. PDF. Video Deployed to win the IROS Autonomous Drone Racing Competition, 2018. Video.
NN to detect the gate (robust to motion blur and illumination variation)
Loquercio, et al., Deep Drone Racing: From Simulation to Reality with Domain Randomization
predict gate pose and covariance
trained in simulation only
sim-to-real world transfer via domain randomization!!!
can be used to drone approach
gazebo simulator was used
ACADO (http://acado.github.io/). ACADO's C++ interface is used to describe the quadrotor model and parameters for transcription into a quadratic program, which is then solved with qpOASES (https://projects.coin-or.org/qpOASES).
Drone acrobatics
Kaufmann, Loquercio, Ranftl, Mueller, Koltun, Scaramuzza, Deep Drone Acrobatics, RSS 2020. PDF. Video.Code Best Paper Award Honorable Mention
traditional drone control architecture
Image/IMU -> State estimation (VIO) -> Planning -> Control -> Collective thrust/Bodyrates -> Low-level controllers
End-to-end sensorymotor control (in a concurrent design fashion)
Image/IMU -> NN -> Collective thrust/Bodyrates
Zero-shot Sim2Real Transfer
related literature
Does computer vision matter for acion? Science Robotics
Controller experiments indicate that explicit intermediate representations help action
use Feature tracks into the NN tracking
Simulation results: lower tracking errors and 0 errors in acrobatics
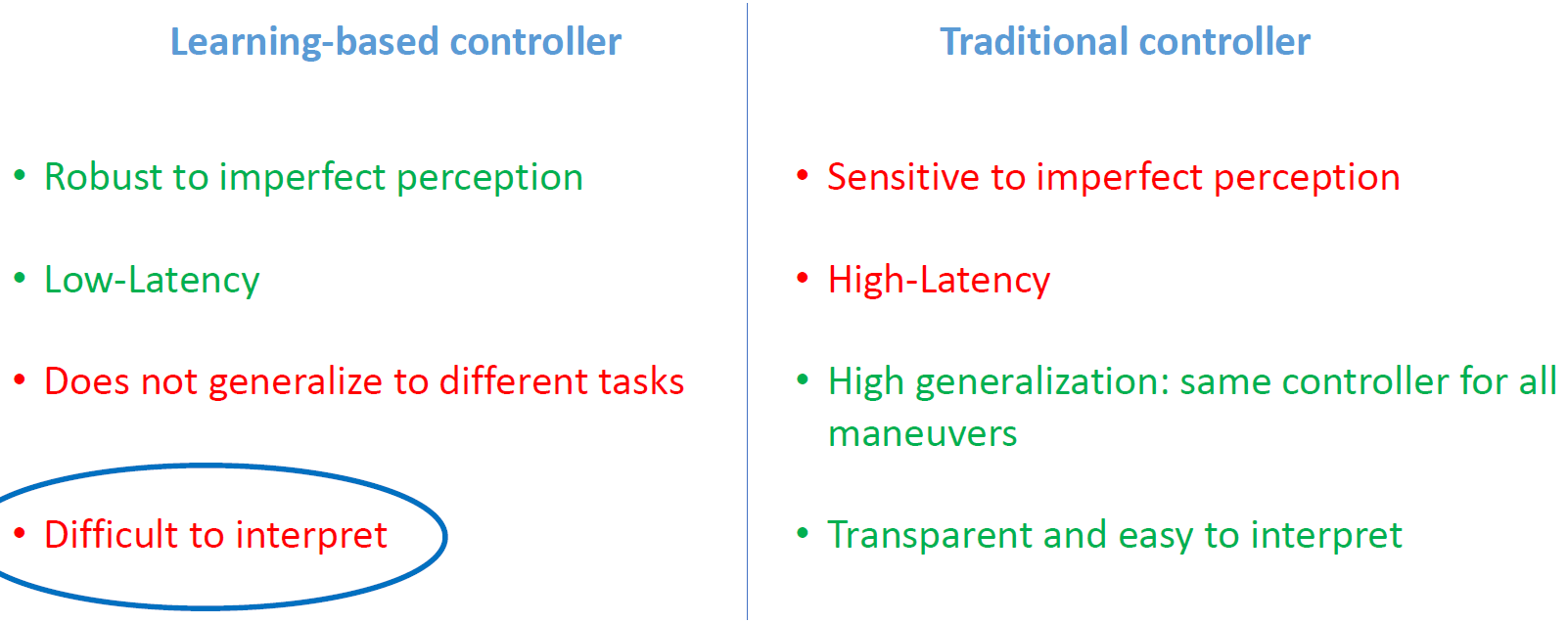
Cons: does not generalize to different tasks
Low-latency sensing
event cameras do not suffer from latency/motion blur or illumination variation.
Application
- VIO in high-speed and HDR environment
- Dynamic Obstacle Avoidance
Learning of flight controllers (week11)
- tightly coupled vision and control
challenge1: Architecture/Input and Output representation
- processing asynchronous data (different frequencies): sampler of IMU info and trajectory, feature tracks -> temporal convolutions -> multilayer perceptron
challenge2: Data collection
imitate and use data from cars and bicycles
- already integrated into city environments
- large publicly available datasets
- no need for an expert drone pilot
DroNet: Learning to Fly by Driving, Loquercio et al., Robotics and Automation Letters 2018, PDF, Video, Code.
- fair performance outdoors; Generalization in Indoor corridors and parking lots
- Analysis on the DroNet -> Line-like feature are a strong cue of direction; Cannot work in forest-like environment/water (state estimation)
Simulation to Reality Transfer -> Sim2Real: Domain Randomization for Drone Racing
Deep Drone Racing with Domain Randomization
Loquercio et al., Agile Autonomy: Learning High-Speed Flight in the Wild, Under Review
Transfer learning: Abstraction
- use abstraction function to make Sim2Real more similar
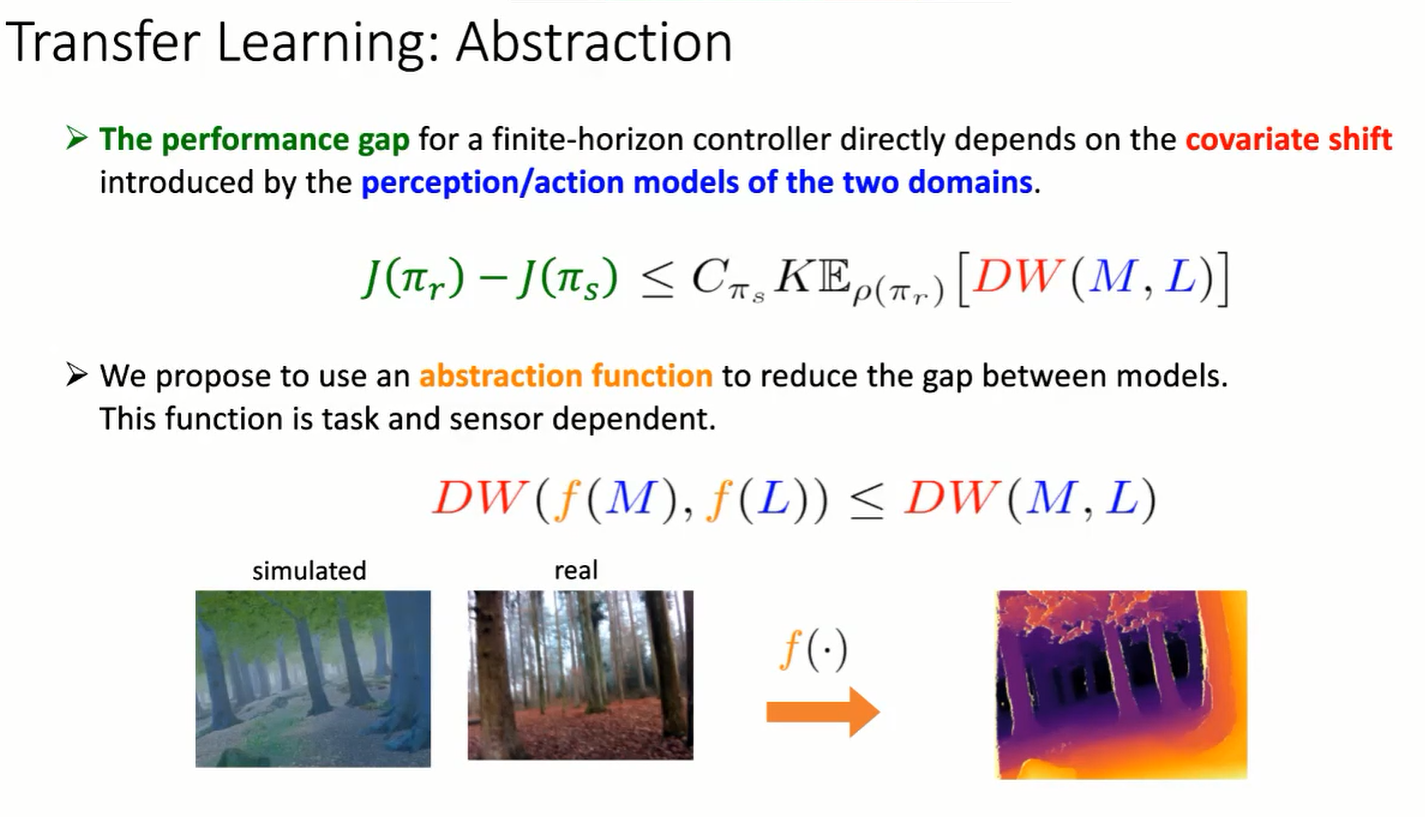
How to find the abstraction function
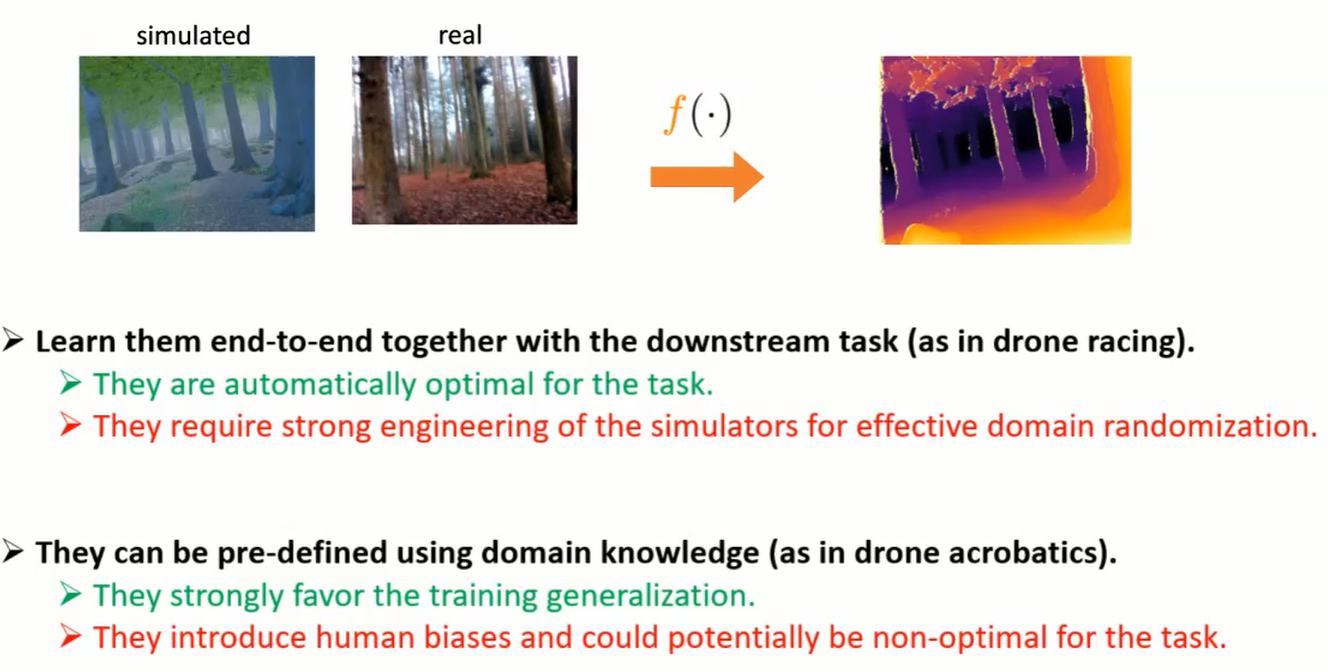
Imitation learning by using current SOTA method (RRT , A*, MPC, LQR) as GT
Limitations of Imitation Learning -> RL
- We don’t yet know how to solves tasks like interaction with other agents, dynamic obstacle avoidance, or complex object manipulation.
- The trained policy does not improve in time.
RL limitations
Design a reward function, then learn via interaction
difficult to design the reward function
state space
vision-based state space is huge -> hard to guarantee enough coverage of the state space
challenge3: Guarantee the platform's safety during training and testing
- difficult to interpret -> measuring uncertainty
Loquercio et al., A General Framework for Uncertainty Estimation in Deep Learning, RA-L 2020
- uncertainty: data uncertainty & model uncertainty
- Demonstrator: future motion prediction; closed loop control of a Quadrotor
Takeaways
- Car-Driving Datasets or Simulation can be used to train deep navigation systems.
- Transfer knowledge via input and output abstractions.
- Measuring the networks’ uncertainty is necessary to guarantee safety.